5safety option 30 – Lenze E84Dxxxxx User Manual
Page 43
Lenze · 8400 protec · Drive-based safety · Software Manual · DMS 2.4 EN · 05/2013 · TD05
43
5
Safety option 30
5.1
Safe inputs
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
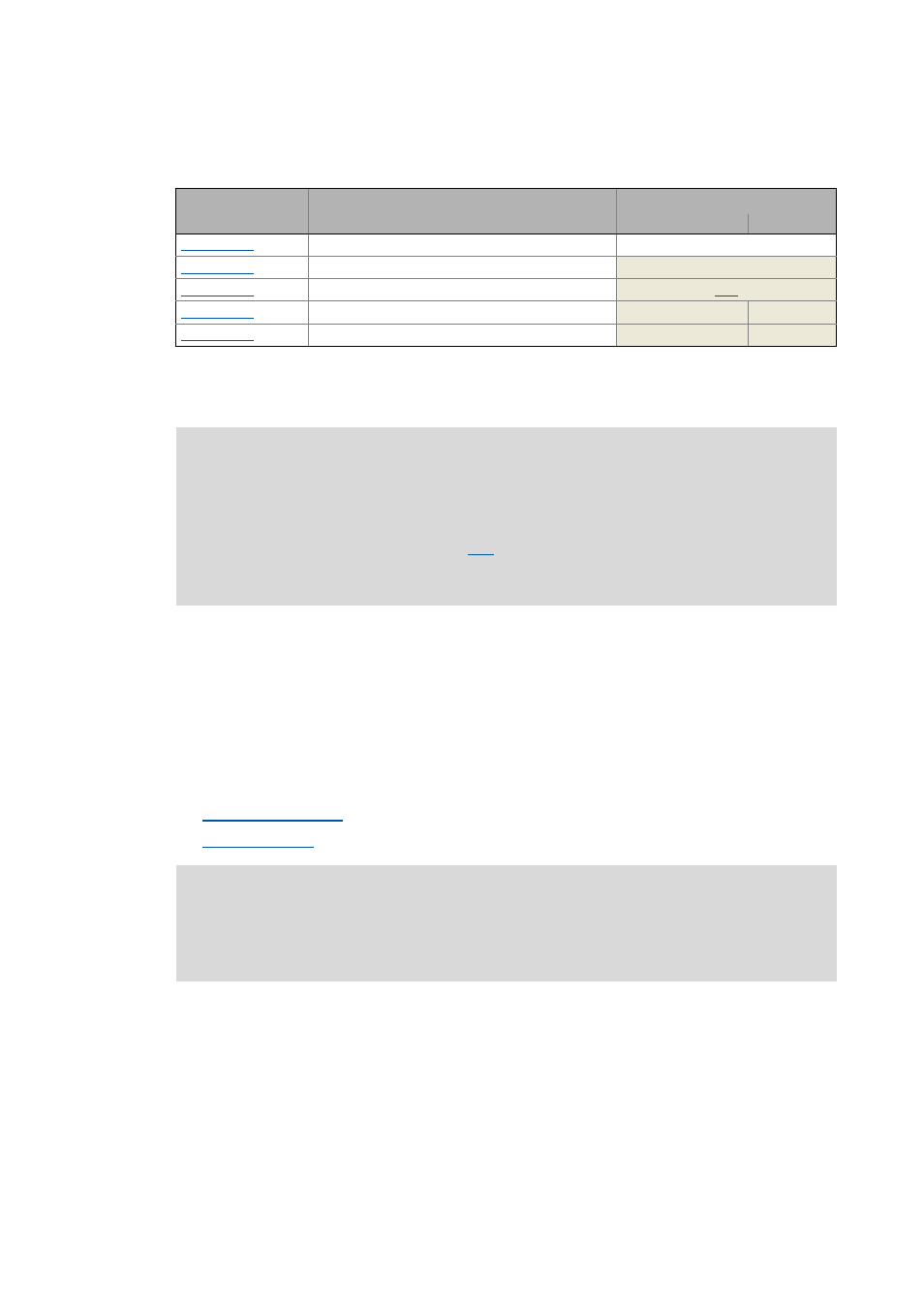
Short overview of "Safe inputs" parameter group:
Sensor type/sensor function
Sensor type and function can be parameterised.
Tip!
Detailed information on sensor inputs, active and passive sensors can be found in the
manual for the drive-based safety system.
Free assignment
If "Free assignment" has been selected as sensor function, the safety function selected via this
parameter is assigned to the safe input. The following safety functions can be selected:
•
•
Discrepancy time
Maximum time for which both channels of a safe input may have non-equivalent states without
the safety engineering detecting an error.
Input delay
Time between the recognition of the signal change and the effective evaluation of an input signal.
As a result, multiple and short signal changes due to contact bounce of the components are not
taken into account.
Parameter
Information
Lenze setting
Value Unit
SD-In1...2 sensor type
Input is deactivated
SD-In1...2 sensor function
Free assignment
SD-In1...2 free assignment
SD-In1...2 discrepancy time
10 ms
SD-In1...2 input delay
0 ms
Note!
If an error (e.g. a discrepancy error) occurs at a safe input to which the "operation mode
selector" sensor function is assigned, then normal operation (corresponding to the OFF
state) is selected.
• The LED "S_Error" is blinking, no
is tripped.
• Special operation can only be selected again if the error has been eliminated and
acknowledged.
Note!
If "No function" has been selected, no safety function is assigned to the safe input.
Function test and monitoring of the discrepancy time remain active and the status of
the input is transmitted to the control via the safety bus (if parameterised).