Diagnostics, 4 faults, 1 fault codes – Lenze E94P PositionServo with MVOB User Manual
Page 97
S94H201E_13426446_EN
L
95
Diagnostics
8.4 Faults
8.4.1
Fault Codes
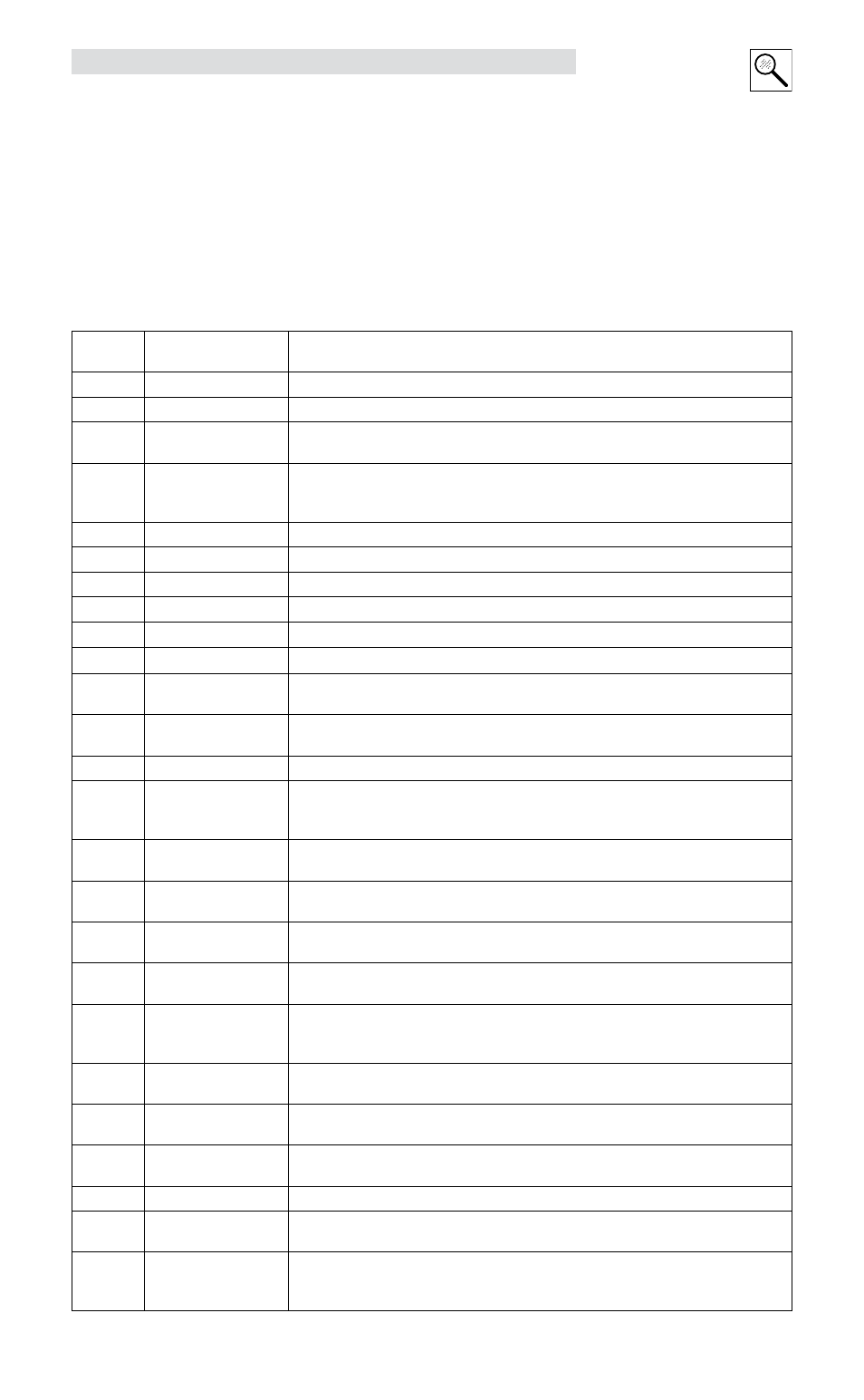
Faults in the drive are immediately shown on the drive display. The fault condition is also recorded to the
drive trip log and the DFaults register inside the drive. The various trip conditions, as they appear on the
display of the drive are listed in the table below.
Fault Codes as Displayed on the Drive
Fault Code
(Display)
Fault
Description
F_OU
Over voltage
Drive bus voltage reached the maximum level, typically due to motor regeneration
F_FB
Feedback error
Invalid Hall sensors code (DFAULT = 2); or Resolver signal lost (DFAULT = 11).
F_OC
Over current
Drive exceeded peak current limit. Software incapable of regulating current within 15%
for more than 20mS. Usually results in wrong motor data or poor tuning.
F_Ot
Over temperature
Drive heatsink temperature has reached maximum rating.
Trip Point = 100°C for all drives except 480V 6A & 9A drives
Trip Point = 108°C for 480V 6A & 9A drives
F_EF
ISO13849-1 fault
The drive is disabled by the ISO13849-1 Safety Function
F_OS
Over speed
Motor has reached velocity above its specified limit
F_PE
Position Error Excess
Position error has exceeded maximum value.
F_bd
Bad motor data
Motor profile data is invalid or no motor is selected.
F_EP
EPM failure
EPM failure on power up
-EP-
EPM missing
EPM not recognized (connected) on power up
F_09
Motor over temperature
Motor over temperature switch activated; Optional motor temperature sensor (PTC)
indicates that the motor windings have reached maximum temperature
F_10
Subprocessor failure
Error in data exchange between processors. Usually occurs when EMI level is high due to
poor shielding and grounding.
F_13
Current feedback error
Current sensor offset is too big (usually noise related).
F_14
Under voltage
(Applies to drive’s with hardware version 1). Occurs when the bus voltage level drops
below 50% of nominal bus voltage while drive is operating. An attempt to enable the drive
with low bus voltage will also result in this fault.
F_15
Hardware overload
protection
Occurs when the phase current becomes higher than 400% of total drive’s current
capability for more then 5
ms.
F_16
Internal Error
Associated with noise. Troubleshoot grounding. If error persists contact factory for
technical support.
F_17
Internal Error
Associated with noise. Troubleshoot grounding. If error persists contact factory for
technical support.
F_18
Arithmetic Error
Division by zero
Statement executed within the Indexer Program results in a division by 0 being
performed. Drive programming error (error in drive source code).
F_19
Arithmetic Error
Register overflow
Statement executed within the Indexer Program results in a value being generated that
is too big to be stored in the requested register. Drive programming error (error in drive
source code).
F_20
Subroutine stack
overflow
Exceeded 32 levels subroutines stack depth. Caused by executing excessive subroutine
calls without a RETURN statement. Drive programming error (error in drive source code).
F_21
Subroutine stack
underflow
Executing RETURN statement without preceding call to subroutine. Drive programming error
(error in drive source code).
F_22
Arithmetic stack
overflow
Variable evaluation stack overflow. Expression too complicated for compiler to process.
Drive programming error (error in drive source code).
F_23
Motion Queue overflow
32 levels depth exceeded. Drive programming error (in drive source code).
F_24
Motion Queue underflow
Relates to the MDV statements in the Indexer Program. Drive programming error (error in
drive source code).
F_25
Unknown
opcode
Byte code interpreter error; May occur when program is missing the closing END
statement; when subroutine has no RETURN statement; or if data in EPM is corrupted at
run-time