Technical data, 2 power ratings – Lenze E94P PositionServo with MVOB User Manual
Page 13
S94H201E_13426446_EN
L
11
Technical Data
Electrical Specifications applicable to all models:
Acceleration Time Range (Zero to Max Speed)
0.1 … 5x10
6
RPM/sec
Deceleration Time Range (Max Speed to Zero)
0.1 … 5x10
6
RPM/sec
Speed Regulation (typical)
± 1 RPM
Input Impedance (AIN+ to COM and AIN+ to AIN-)
47 k
Ω
Power Device Carrier Frequency (sinusoidal commutation)
8, 16 kHz
Power Supply (max)
+5 VDC @ 300 mA
Maximum Encoder Feedback Frequency
2.1 MHz (per channel)
Maximum Output Frequency (to motor)
400 Hz
Resolver Carrier Frequency
4.5 - 5.5kHz (5kHz nom)
Resolver Turns Ratio: Reference to SIN/COS signal
2:1
Resolver Voltage
10V peak to peak
Maximum Resolver Feedback Speed
6500 rpm
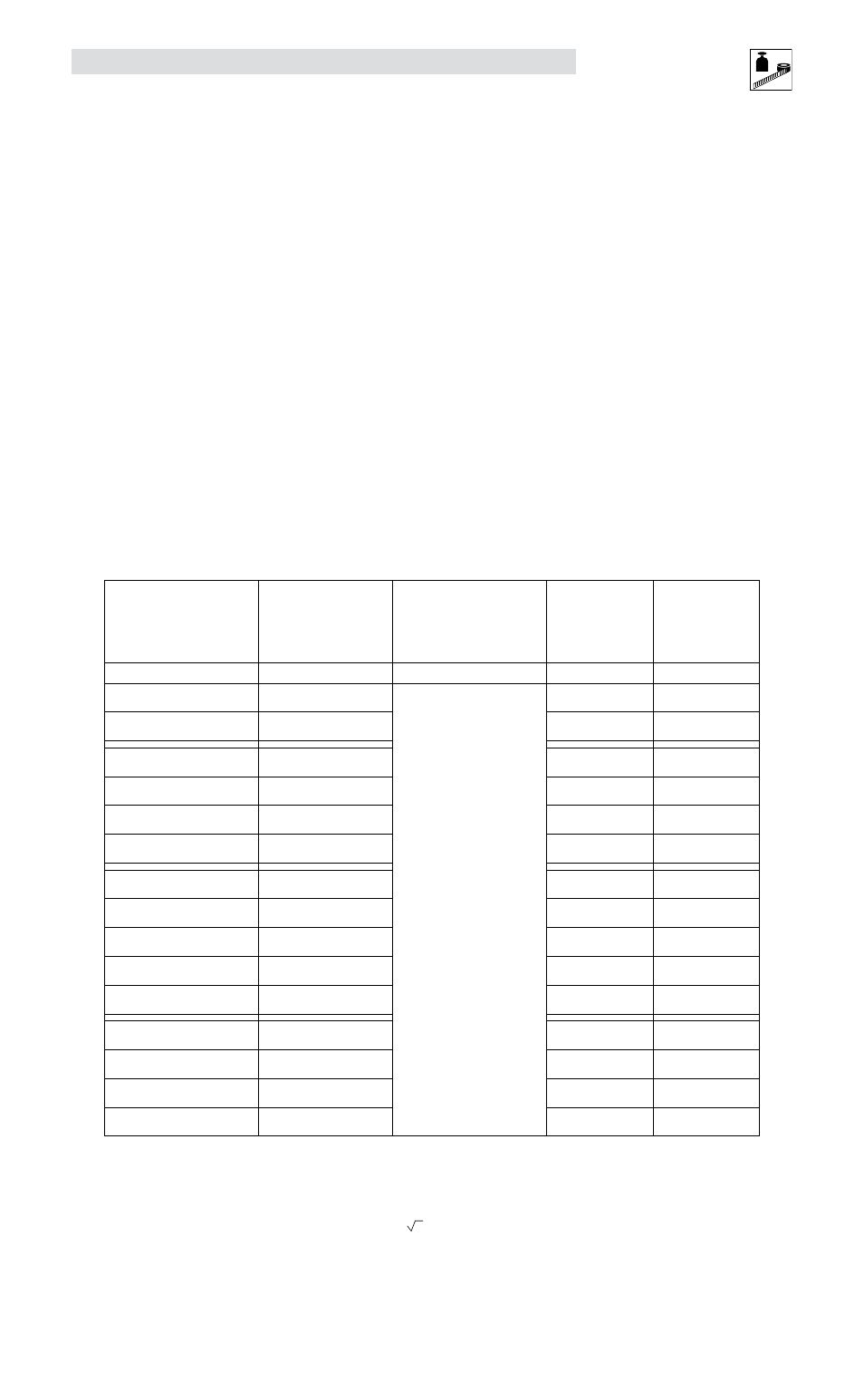
2.2
Power Ratings
Type
(1)
Output Power
at Rated Output
Current (8kHz)
(2)
Leakage Current
Power Loss at
Rated Output
Current
(8kHz)
Power Loss at
Rated Output
Current
(16 kHz)
(3)
Units
kVA
mA
Watts
Watts
E94_020S1N_~
0.8
Typically >3.5 mA.
Consult factory for
applications requiring
<3.5 mA.
19
21
E94_040S1N_~
1.7
29
30
E94_020S2F_~
0.8
19
21
E94_040S2F_~
1.7
29
30
E94_080S2F_~
3.3
61
63
E94_100S2F_~
4.2
80
85
E94_020Y2N_~
0.8
19
21
E94_040Y2N_~
1.7
29
30
E94_080Y2N_~
3.3
61
63
E94_120Y2N_~
5.0
114
129
E94_180T2N_~
7.5
171
195
E94_020T4N_~
1.7
31
41
E94_040T4N_~
3.3
50
73
E94_060T4N_~
5.0
93
122
E94_090T4N_~
7.5
138
182
(1)
The first “_” equals “P” for the Model 940 encoder based drive
or “R” for the Model 941 resolver based drive.
The second “_” equals “E” for incremental encoder (must have E94P drive)
or “R” for the standard resolver (must have E94R drive).
The last digit “~” equals “M” for MV OnBoard and no ISO 13849-1 circuit or “S” for MV OnBoard plus the ISO 13849-1 circuit.
(2)
At 240 VAC line input for drives with suffixes “S1N”, “S2F”, “Y2N”. At 480 VAC line input for drives with suffixes “T4N”.
a. The output power is calculated from the formula: output kVA = [( 3) x U
LL
x I
rated
] / 1000
b. The actual output power (kW) depends on the motor in use due to variations in motor rated voltage, rated speed and power factor, as well as actual max
operating speed and desired overload capacity.
c. Typical max continuous power (kW) for PM servo motors run 50-70% of the kVA ratings listed.
(3)
At 16 kHz, de-rate continuous current by 17%