Parameters, 12 master encoder input type (position mode only), 13 master encoder - system to master ratio – Lenze E94P PositionServo with MVOB User Manual
Page 53: 14 autoboot, 15 user units, 16 rotation direction, 17 resolver tracks
S94H201E_13426446_EN
L
51
Parameters
5.3.12 Master Encoder Input Type (position mode only)
This parameter sets the type of input for position reference the drive expects to see. Signal type can be step
and direction [Step & Direction] type or quadrature pulse-train [Master Encoder]. Refer to section 4.2.1 for
details on these inputs.
5.3.13 Master Encoder - System to Master Ratio
This parameter is used to set the scale between the reference pulse train (when operating in position mode)
and the system feedback device. The system feedback device is the motor encoder or resolver.
5.3.14 Autoboot
When set to “Enabled” the drive will start to execute the user’s program immediately after cold boot (reset).
Otherwise the user program has to be started from MotionView or from the Host interface.
5.3.15 User Units
This parameter sets up the relationship between User Units and motor revolutions. From here you can
determine how many User Units there is in one motor revolution. This parameter allows the user to scale
motion moves to represent a desired unit of measure, (inches, meters, in/sec, meters/sec, etc).
User Units Example: A linear actuator allows a displacement of 2.5” with every revolution of the motor’s
shaft.
Units = Units / Revolutions
Units = 2.5 Inches / Revolution
Units = 2.5
5.3.16 Rotation Direction
This parameter sets up the direction of foward (positive) rotation. To reverse the direction of positive rotation
for a specific installation, change Rotation Direction from “Normal” to “Reversed”.
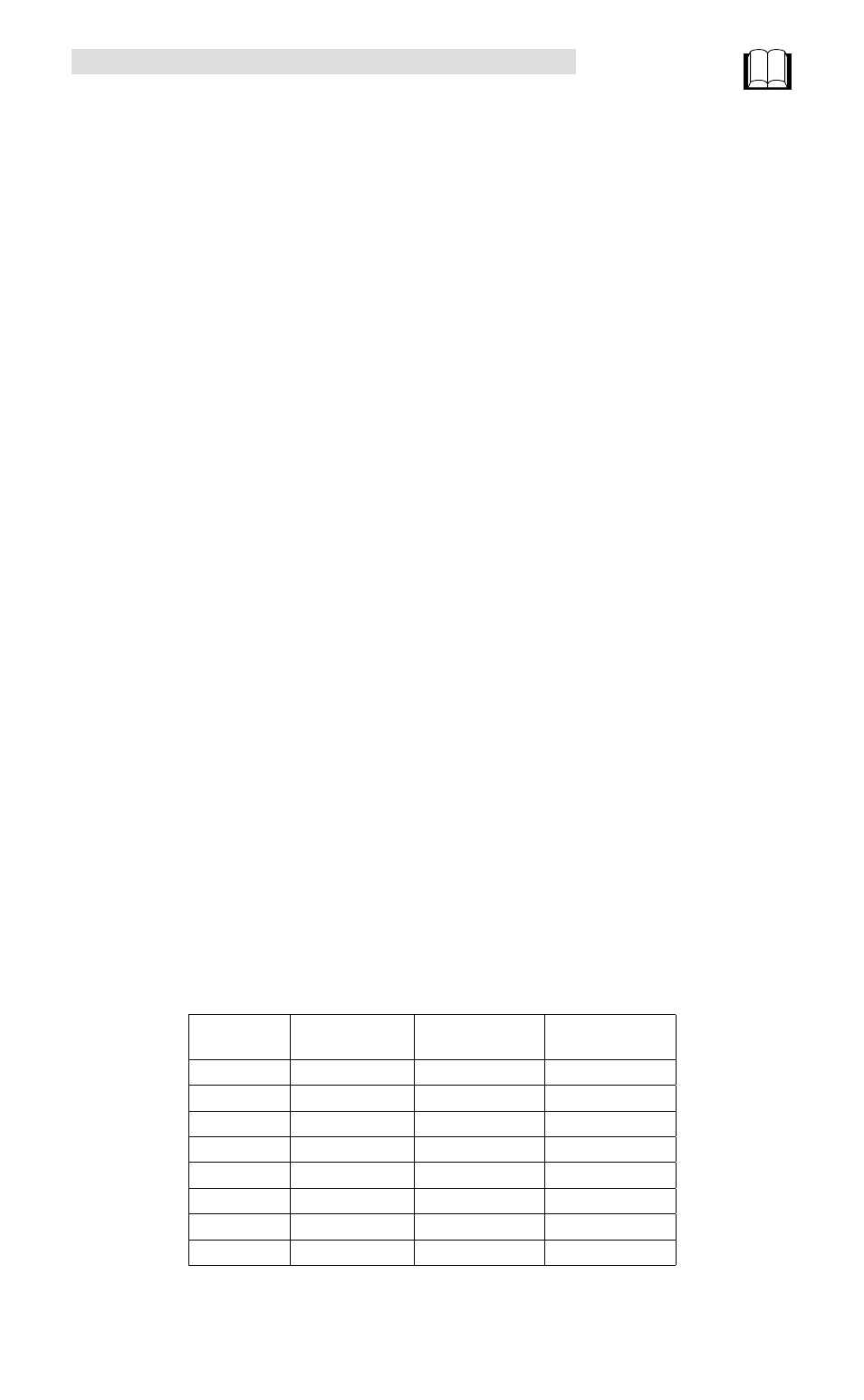
5.3.17 Resolver Tracks
The Resolver Tracks parameter is used in conjunction with the resolver motors and Buffered Encoder
Outputs (Section 4.2.2). If a motor with resolver feedback is being used a simulated encoder feedback is
transmitted out the Buffered Encoder Outputs, P3.7 to P3.12. The default resolution of this feedback is 1024
pulses per revolution, pre quad. If a different resolution is required then the Resolver Tracks parameter is
utilized. The number entered into this field, 0-15, correlates to a specific encoder resolution.
Resolver Tracks Configuration
Resolver
Track
Resolution
Before Quad
Resolver Track
Resolution Before
Quad
0
1024
8
1000
1
256
9
1024
2
360
10
2000
3
400
11
2048
4
500
12
2500
5
512
13
2880
6
720
14
250
7
800
15
4096