Parameters, 9 motor temperature sensor, 10 motor ptc cutoff resistance – Lenze E94P PositionServo with MVOB User Manual
Page 52: 11 regen duty cycle
50
L
S94H201E_13426446_EN
Parameters
5.3.9
Motor Temperature Sensor
This parameter enables / disables motor over-temperature detection. It must be disabled if the motor PTC
sensor is not wired to either P7.1-2 or to the resolver feedback input (P4 or P11).
5.3.10 Motor PTC Cutoff Resistance
This parameter sets the cut-off resistance of the PTC that defines when the motor reaches the maximum
allowable temperature. Refer to section 4.5.2 for details on how to connect the motor’s PTC.
5.3.11 Regen Duty Cycle
This parameter sets the maximum duty cycle for the brake (regeneration) resistor. This parameter can be
used to prevent brake resistor overload. Use the following formula to calculate the maximum value for this
parameter. If this parameter is set equal to the calculated value, the regeneration resistor is most effective
without overload. One may set this parameter with a value smaller than the calculated one if the drive will
not experience over voltage fault during regeneration.
D = P * R / (Umax)
2
* (1/D
application
) * 100%
Where:
D (%)
regeneration duty cycle
Umax (VDC)
bus voltage at regeneration conditions
U
max
= 390 VDC for 120/240 VAC drives and 770 VDC for 400/480 VAC drives.
R (Ohm)
regeneration resistor value
P (W)
regeneration resistor rated power
D
application
(%)
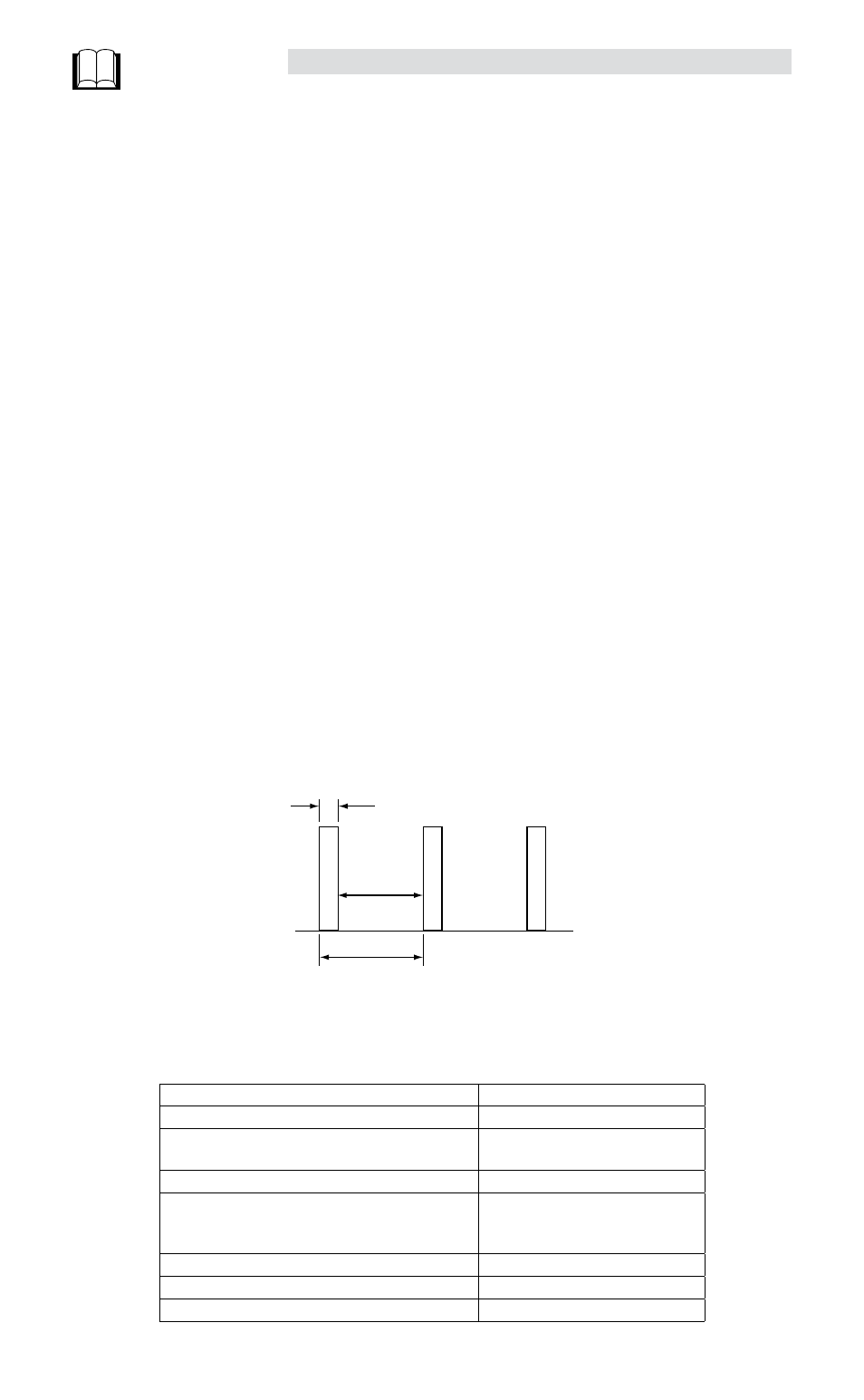
application duty cycle. For the continuous regeneration applications, use Dapplication = 1. For
the intermittent regeneration applications, use Dapplication = t/T, where t is the duration when
regeneration is needed and T is the time interval between two regenerations. Both t and T must use
the same time unit, e.g., seconds
t, regeneration
T-t, regeneration
is not needed
T
If calculation of D is greater than 100% set it to 100% value. If calculation of D is less than 10% then
resistor power rating is too low. For more information refer to the PositionServo Dynamic Braking Manual
(G94BR01).
Minimum Required Dynamic Braking Resistance
Drive Model
DB Minimum Resistance (Ω)
E94_180T2N~~
15
E94_080S2F~~, E94_080Y2N~~,
E94_100S2F~~, E94_100Y2N~~
20
E94_120Y2N
30
E94_020S1N~~, E94_020S2F~~,
E94_020Y2N~~, E94_040S1N~~,
E94_040S2F~~, E94_040Y2N~~
40
E94_090T4N~~
45
E94_040T4N~~, E94_050T4N~~, E94_060T4N~~
75
E94_020T4N~~
150