AW Gear Meters EMO-1005 User Manual
Page 23
AW-Lake Company 8809 Industrial Drive, Franksville, WI 53126 web: www.awgearmeters.com
Tel: 262-884-9800 Fax: 262-884-9810 Email: [email protected]
REV. 1a 05/98 EMO-1005 Manual.DOC
22
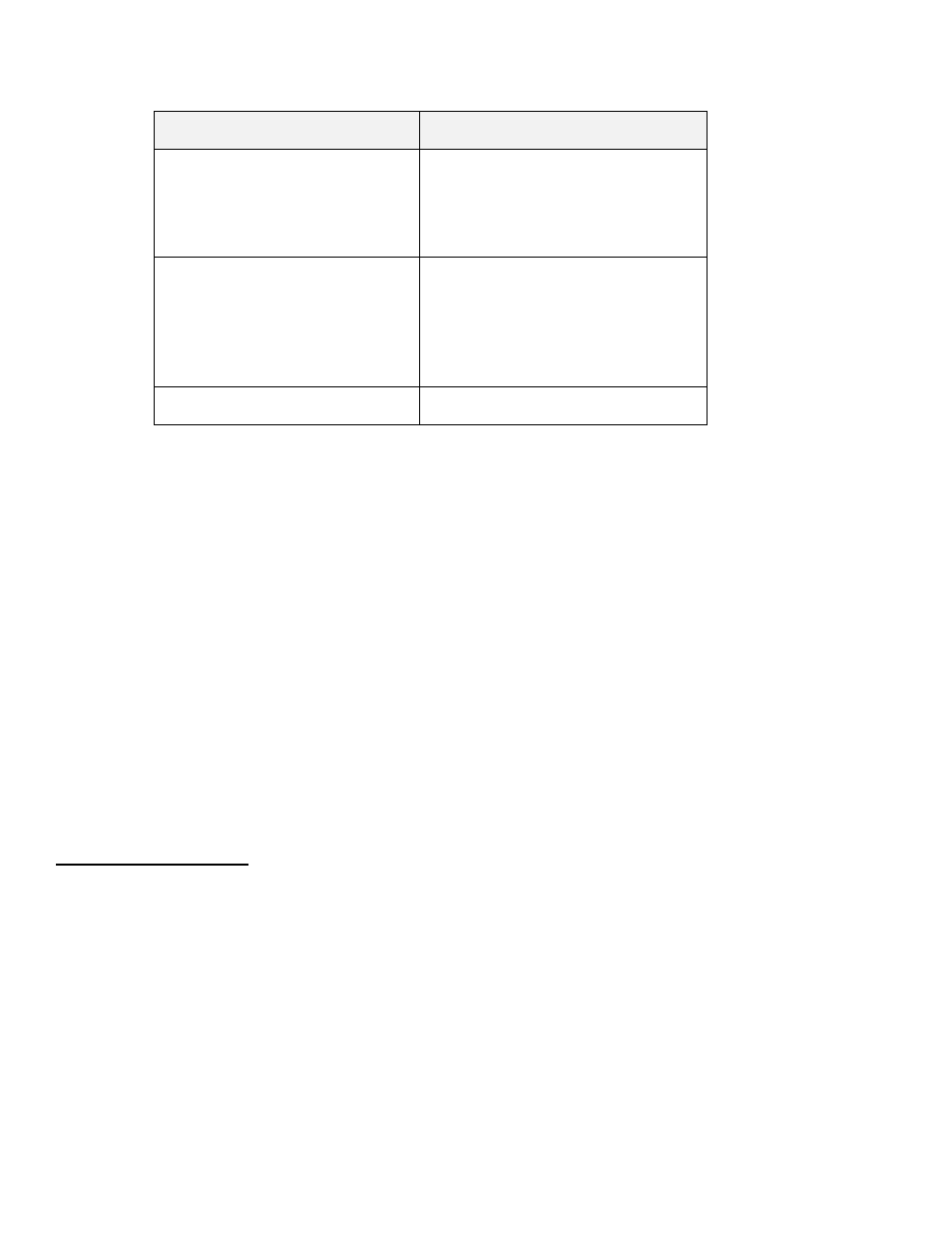
The limits in monitor mode have no validity in PID mode, the following table shows their revised
functions and programming locations.
MONITOR MODE
CLOSED LOOP (PID)
Rate Limit 1 (Hz)
Rate Limit 2 (Hz)
Rate Limit 3 (Hz)
Rate Limit 4 (Hz)
Set Value 1 (Pg. 20)
Set Value 2 (Pg. 20)
Total Limit 1 (Impulses)
Total Limit 2 (Impulses)
Total Limit 3 (Impulses)
Total Limit 4 (Impulses)
Initial Kick (Pg. 22)
Integral Adder for I-Part (Pg.
21)
Initial Kick Threshold (Pg. 23)
Totalizer Reset (Pin 9)
Auto Hold of last Analog Value
When operating in Monitor Mode, there are a total of 4 Limits available for use. Each one can be
programmed for both Rate and Total Values in separate locations. However, to avoid operator
confusion, it is recommended to maintain separation.
Use each Limit number for only one alarm condition.
The formula used in PID Mode to achieve a set value from a frequency input signal (CURRENT
VALUE) is as follows:
AnalogOut=AnalogOutOld+KFA* (SET VALUE-CURRENT VALUE) + I-part
where,
AnalogOutOld is the Analog Output value prior to the current calculation.
KFA is the gain factor
SET VALUE is a selected programmed value.
CURRENT VALUE is the last calculated rate value.
I-part is the programmed adder.
Integral Adder, I-Part
In most applications, an I-part is not necessary, but if the KFA is very low, an I-part = 1 could be used.
The above formula will be evaluated every rising edge of the input frequency. This feature makes the
EMO-1005 PI-unit react faster at higher frequencies and slower at lower frequencies.
KFA in Monitor mode is the gain factor for the Analog Output.
In the PI-mode KFA becomes the closed loop gain factor, and an increase in the KFA results in a
quicker reaction time and in a "stiffer" system. However, whenever the KFA has too big of a value, the
system tends to show unstable behavior (swinging).