Proportional- plus integralregelung (pi-regelung), Toleranzband, Abbildung 7.7b — pid-regelung – Watlow Series F4P User Manual
Page 61: Abbildung 7.7c — toleranzband kühlprozeß
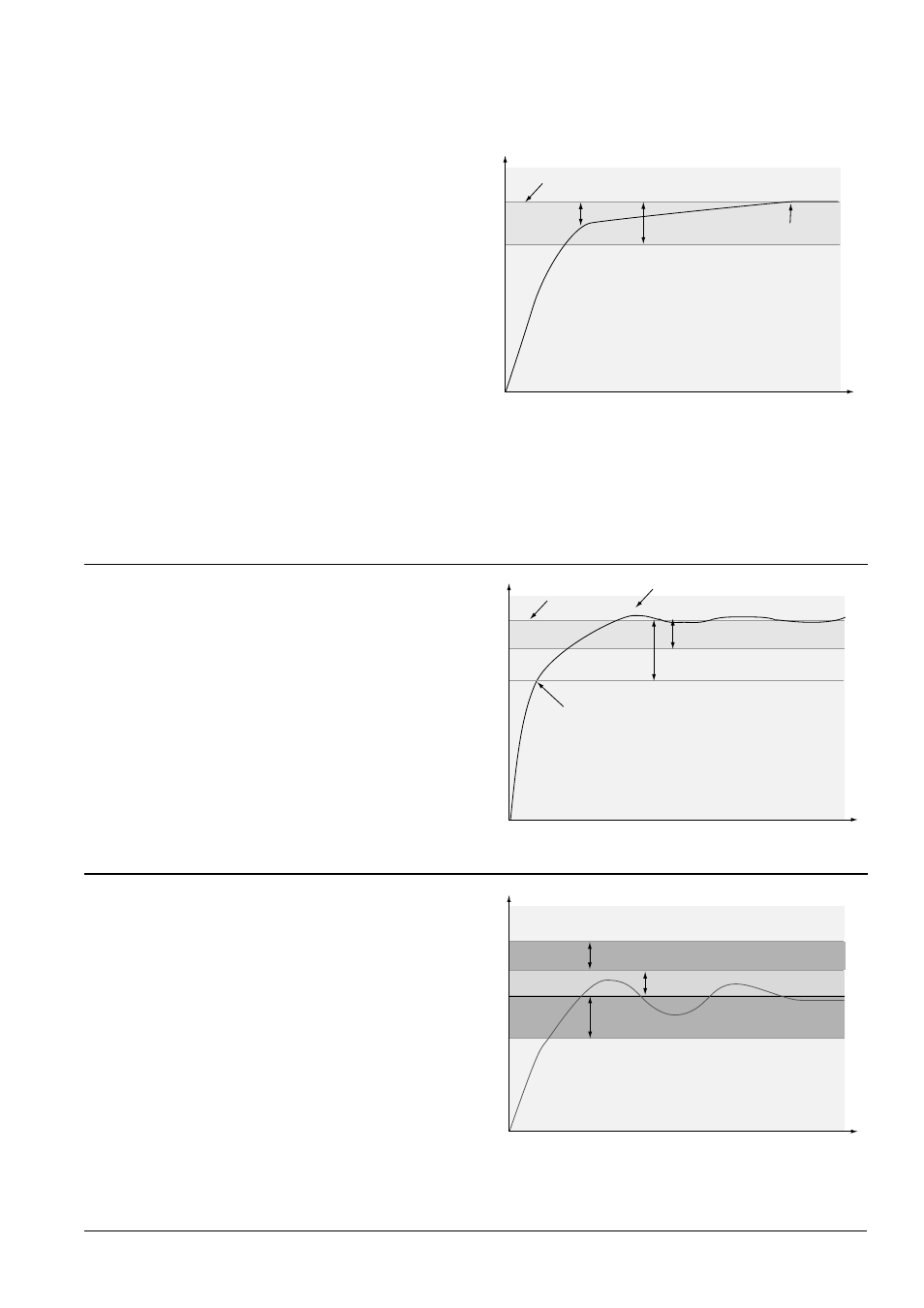
Die für die P-Regelung typische bleibende
Regelabweichung kann dadurch ausgeglichen werden, daß
man dem Regelsystem eine Integralregelung hinzufügt.
Nach der Systemstabilisierung nähert der Integralanteil
der PI-Regelung den Temperatur- oder Prozeßwert an den
Sollwert an, wobei die Geschwindigkeit der Annäherung
von der Einstellung des Integrals abhängt. Es besteht
jedoch auch bei diesem Regelungsverfahren die Gefahr des
Überschwingens, und zwar besonders bei einer
Sollwertänderung oder bei Inbetriebnahme des Systems.
Ein zu hoher Integralanteil kann zur Instabilität eines
Systems beitragen. Der Integralanteil wird beendet, sobald
der Prozeßwert das Proportionalband verläßt.
Der Integralanteil SI (wenn die Einheiten auf SI gestellt
sind) wird in Minuten pro Wiederholung gemessen. Ein
geringer Integralanteil SI hat eine schnelle Korrektur der
durch den Proportionalanteil hervorgerufenen bleibenden
Regelabweichung zur Folge. Der Integralanteil US (wenn
die Einheiten auf US gestellt sind) wird in Wiederholungen
pro Minute gemessen. Ein hoher Integralanteil US hat eine
schnelle Korrektur der bleibenden Regelabweichung zur
Folge. Menü: Betriebsmenü > Alarmsollwert > Alarm x (1
oder 5).
Abbildung 7.7a — Proportional- plus Integralregelung.
Zeit
Temperatur
Sollwert
Proportionalband
Korrektur der bleibenden
Regelabweichung
Bleibende
Regelabweichung
Wa t l o w S e r i e F 4 P
L e i s t u n g s m e r k m a l e
■
7 . 7
Proportional- plus Integral- plus
Differentialregelung (PID-Regelung)
Der Differentialanteil der PID-Regelung wird dazu
verwendet, das Überschwingen in einem PI-kontrollierten
System zu minimieren. Der Differentialanteil gleicht die
Leistung eines Ausgangs der Veränderungsrate des
Temperatur- oder Prozeßwertes an. Ein zu hoher
Differentialanteil kann zur Trägheit eines Systems
beitragen. Menü: Betriebsmenü > PID-Bearbeitungsmenü >
PID-Satz x (1 bis 5).
Abbildung 7.7b — PID-Regelung.
Zeit
Temperatur
Sollwert
Reduziertes Überschwingen
Proportionalband
Proportionalband x 2
Erhitzung wird gedrosselt
Toleranzband
In einer Anwendung mit mehreren PID-Sätzen tragen die
Toleranzbänder überhalb und unterhalb des Sollwerts dazu
bei, die Prozeßtemperatur innerhalb akzeptabler Grenzen
zu halten, was zu einer Energieersparnis führen und
Verschleißerscheinungen entgegenwirken kann. Die
Verschiebung des tatsächlichen Kühlprozeß- sowie
Heizprozeßsollwerts verhindert, daß sich die beiden
Systeme in die Quere kommen.
Die Proportionalregelung wird gestoppt, wenn sich der
Prozeßwert innerhalb des Toleranzbandes befindet. Der
Integralanteil bringt die Prozeßtemperatur jedoch noch
näher an den Sollwert heran. Wenn der Toleranzbandwert
null ist, wird der Heizprozeß aktiv, sobald die Temperatur
unter den Sollwert sinkt, und der Kühlprozeß wird aktiv,
sobald die Temperatur den Sollwert übersteigt. Menü:
Betriebsmenü > PID-Bearbeitungsmenü > PID-Satz x (1
bis 5).
Abbildung 7.7c — Toleranzband Kühlprozeß.
Zeit
Temperatur
Sollwert Heizen
Proportionalband Heizen
Sollwert Kühlen
Proportionalband Kühlen
Toleranzband Kühlen
Proportional- plus Integralregelung (PI-Regelung)