Warner Electric MCS-208 User Manual
Page 10
10
Warner Electric • 800-825-9050
P-276 • 819-9045
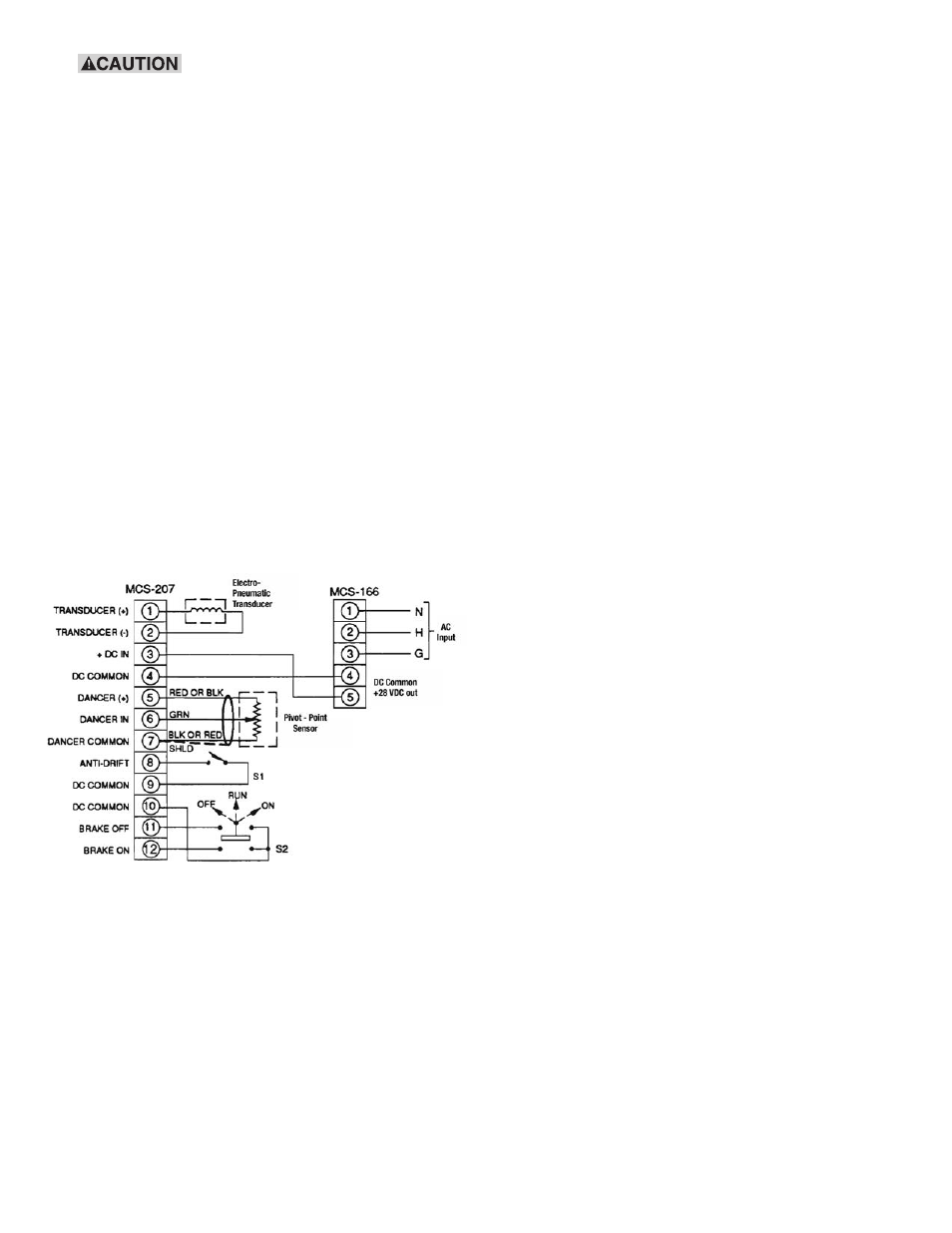
The switch or relay used for the
anti-drift input should be open during normal
running operation to prevent unpredictable
reactions.
b.
Brake-Off Switch
Connect switch contacts between
Terminals 10 and 11 of MCS-207
terminal strip.
c.
Brake-On Switch
Connect switch contacts between
Terminals 10 and 12 of MCS-207
terminal strip.
NoTe: For single brake off function only, use a Single
Pole-Single Throw, maintained contact switch. For both
functions, a three position switch as shown in Figure 9,
page 10, is recommended.
6. Double check all wiring connections per Figure 9.
Insure all terminals are tight.
7. Reconnect the front housing of either wall or shelf
mounting and secure the latches. If shelf
mounting is used, secure the housing with the
four (4) bolts for each section.
8. Do not insert the control modules at this time.
Proceed to the MCS-166/MCS-207 start-up
section of this manual.
MCS-166/MCS-208
Refer to all Figures on pages 11 for actual wiring
connections.
1. Wire AC input to terminals 1, 2 and 3 of the
MCS-166 terminal block: terminal 1 to be AC
neutral, terminal 2 AC hot, and terminal 3 earth
ground.
2. Wire MCS-166 DC output to MCS-208 input:
MCS-166 DC common terminal 4 to MCS-208
DC common terminal 4. MCS-166 (+) DC terminal
5 to MCS-208 (+) input terminal 3.
3. Connect transducer wires to terminals 1 and 2 of
MCS-208 Terminal Block.
4. External Switch Connections (optional)
a.
Brake-Off Switch
Connect switch contacts between
terminals 10 and 11 of MCS-208
terminal strip.
b.
Brake-On Switch
Connect switch contacts between
terminals 10 and 12 of MCS-208
terminal strip.
NoTe: If only a single brake-off function is used, an
SPST maintained contact switch may be used. If both
functions are used, a three position switch is
recommended, as shown in Figure 10, page 11.
5. Control Input Connections
Follow the procedure below (a, b, c, or d) which applies
to the control input mode selected.
Refer to Figure 11, page 12 for various input connection
configurations.
a.
Local Torque Adjust Mode
Connect jumper between MCS-208
terminals 6 and 8, per Figure 11B, page 12.
b.
Remote Torque Adjust/Roll Follower Pot
Connect remote potentiometer or roll
follower potentiometer to MCS-208
terminals 5, 6, and 7, per Figure 11C,
page 12.
NoTe: Wiper will always be connected to terminal 6.
End points should be connected so that turning the
remote pot CCW or moving the roll follower pot toward
the core will decrease voltage at terminal 6.
c.
Voltage Source Input
Connect (+) side of external voltage source
Figure 9. MCS-166/MCS-207 Wiring
Single or Dual Brake