User faults – Parker Products ViX250AE User Manual
Page 68
4. CONTROL OF VIX DRIVES 61
User Faults
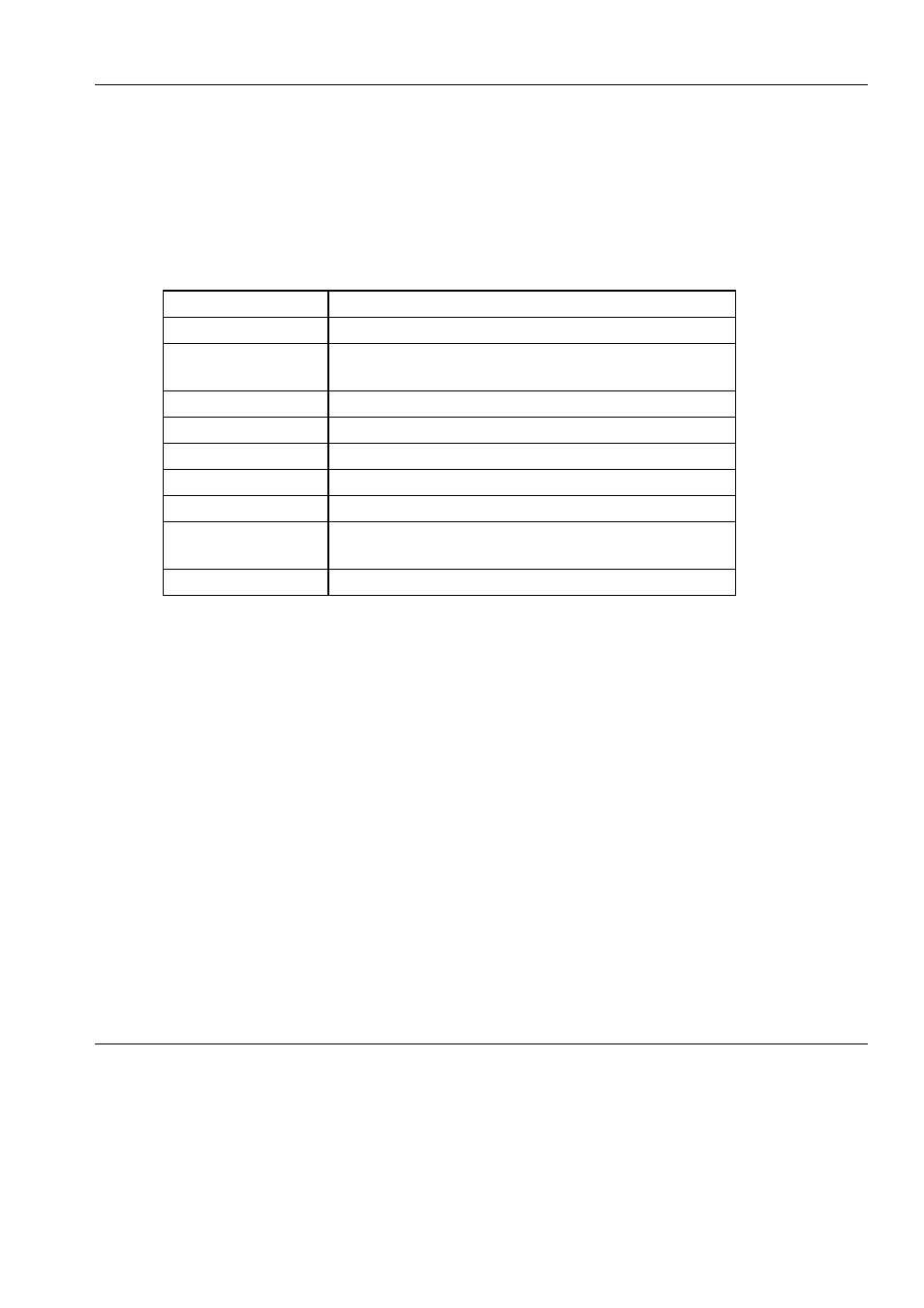
Programming errors, such as issuing a GO command when the drive is de-energised can
cause user faults. The report uses a 32-bit word format the same as Drive Faults.
Performing a read UF command will report the current state of any User Faults listed in
Table 4-6.
Bit Number
UF Information
1
Value is out of range
2
Incorrect command syntax, command has
wrong format
8
Drive de-energised
16
Transmit buffer overflow*
19
Drive not ready
22
Save/restore error
23
Command not supported by this product
26
Cannot execute motion as the brake is
engaged
27 to 32
Reserved
Table 4-6. User Fault Bit Description
*sends an ASCII ‘bell’ character to indicate a buffer overflow condition.
User Fault Byte Reporting
In exactly the same way as the status variable, the user fault status can be reported a byte
at a time, using UFn within a read command. For example to read or test the first 8 bits (first
byte) of the UF variable status word, use UF1. Since the status word consists of 4 bytes the
relevant part of the word can be read using UF1 (bits 1 to 8), UF2 (bits 9 to 16), UF3 (bits 17
to 24) or UF4 (bits 25 to 32).
Resetting User Fault Bits
The User Fault variable (UF) is cleared to all zeroes once it has been read by issuing a
aR(UF) command. Reading individual bytes of the User Faults variable will not clear any
particular byte, so issuing a R(UF2) command will keep byte 2 bits intact. Also testing a
particular byte using the IF or TR command will keep bits intact.
Note: sending the drive an ON command will immediately clear the User Fault variable,
setting all four bytes to 00000000.