Parker Products ViX250AE User Manual
Page 67
VIX AE SERVO DRIVE USER GUIDE
60
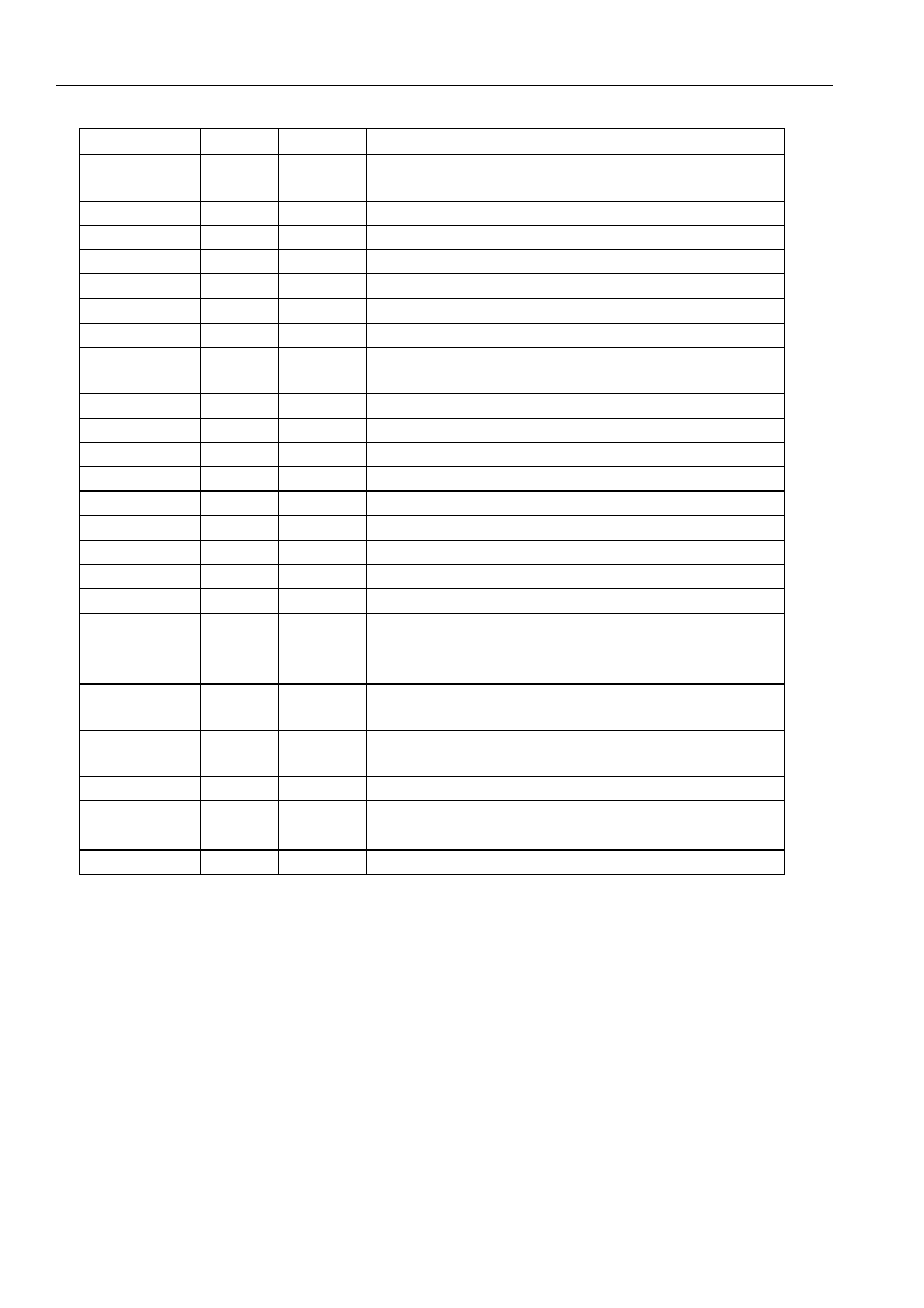
Bit Number
Stop
Type
DF Information
1
Composite fault (anything that causes a drive
fault)
2
K
T
+/-15V supply rail
3
K
R
Motor HV under-voltage trip point reached
4
K
R
Motor HV over-voltage trip point reached
5
C
R
V I/O under-voltage trip point reached
6
C
R
V I/O over-voltage trip point reached
7
K
T
Encoder/Auxiliary 5V under voltage trip
8
K
T
Impending power loss
(24V – logic supply)
9
K
T
Commutation Fault
10
K
T
Resolver fault
11
C
R
Motor over temperature
12
C
R
Ambient over temperature
13
C
R
Drive over temperature
14
K
T
Incompatible firmware version
15
K
T
Unrecognised power stage
16
K
T
Controller diagnostic failure
17
K
R
Output stage over current
18
C
R
Output driver over current
19
C
R
Tracking limit exceeded while in motion is a
latched fault
20
K
R
Velocity exceeded (unstable gains/motor spin-
off)
21
C
R
Energise input not set – check energise input
and state of ES variable
22-24
Reserved
25
K
T
Watchdog 1
26
K
T
Watchdog 2
27
K
T
Watchdog 3
Table 4-5. Drive Fault Bit Description
Key:
C: Performs controlled stop
K: Performs motion kill – quick stop. Possible instant de-energise depending on fault source
R: Recoverable without power cycle
T: Terminal (requires power cycle or repair before drive will energise/operate again)
Drive Fault Byte Reporting
In exactly the same way as the status variable, the drive fault status can be reported a byte
at a time, using DFn within a read command.