Parker Products ViX250AE User Manual
Page 62
4. CONTROL OF VIX DRIVES 55
DF Description
See drive fault bit description in Reporting the Status of Variables.
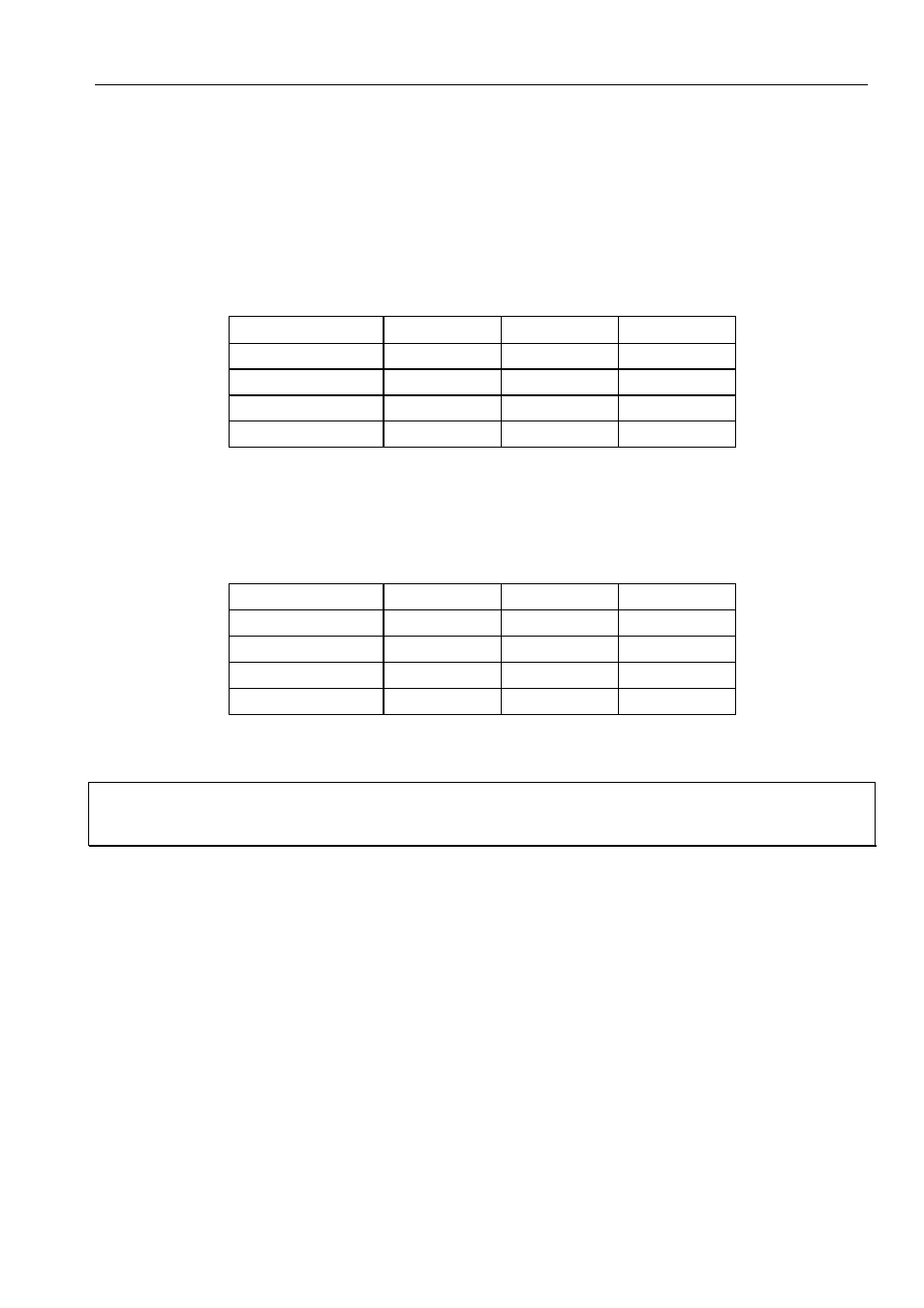
EO Description
Use encoder outputs (connector X4) to supply a step-direction or step-up/step-down signal
for use by another drive. System parameter EO determines the output as defined in
Table 4-2.
X4
EO=0
EO=1
EO=2
14
STEP+
CW+
A+
9
STEP-
CW-
A-
15
DIR+
CCW+
B+
10
DIR-
CCW-
B-
Table 4-2. Encoder Output Configuration
EI Description
System parameter EI, controls encoder inputs (connector X4) as defined in Table 4-3.
X4
EI=0
EI=1
EI=2
12
STEP+
CW+
A+
7
STEP-
CW-
A-
13
DIR+
CCW+
B+
8
DIR-
CCW-
B-
Table 4-3. Encoder Input Configuration
CAUTION
De-energise the drive before changing EI and EO.
ES Description
System variable ES controls the required polarity of signal on the energise/energise_bar
input (X4 pin 11). The default value of ES is zero (ES=0), therefore to energise the drive
connect X4 pin 11 to X4 pin 4 (0V). With ES=1, X4 pin11 may be left open circuit to
energise the drive.
EX Description
System variable EX controls the style and protocol of the drive’s serial communications link.
FT Description
Fast positioning systems need high proportional and velocity gains. By limiting the
bandwidth, the digital filter prevents a high gain system from becoming too lively. The filter