Parker Products ViX250AE User Manual
Page 60
4. CONTROL OF VIX DRIVES 53
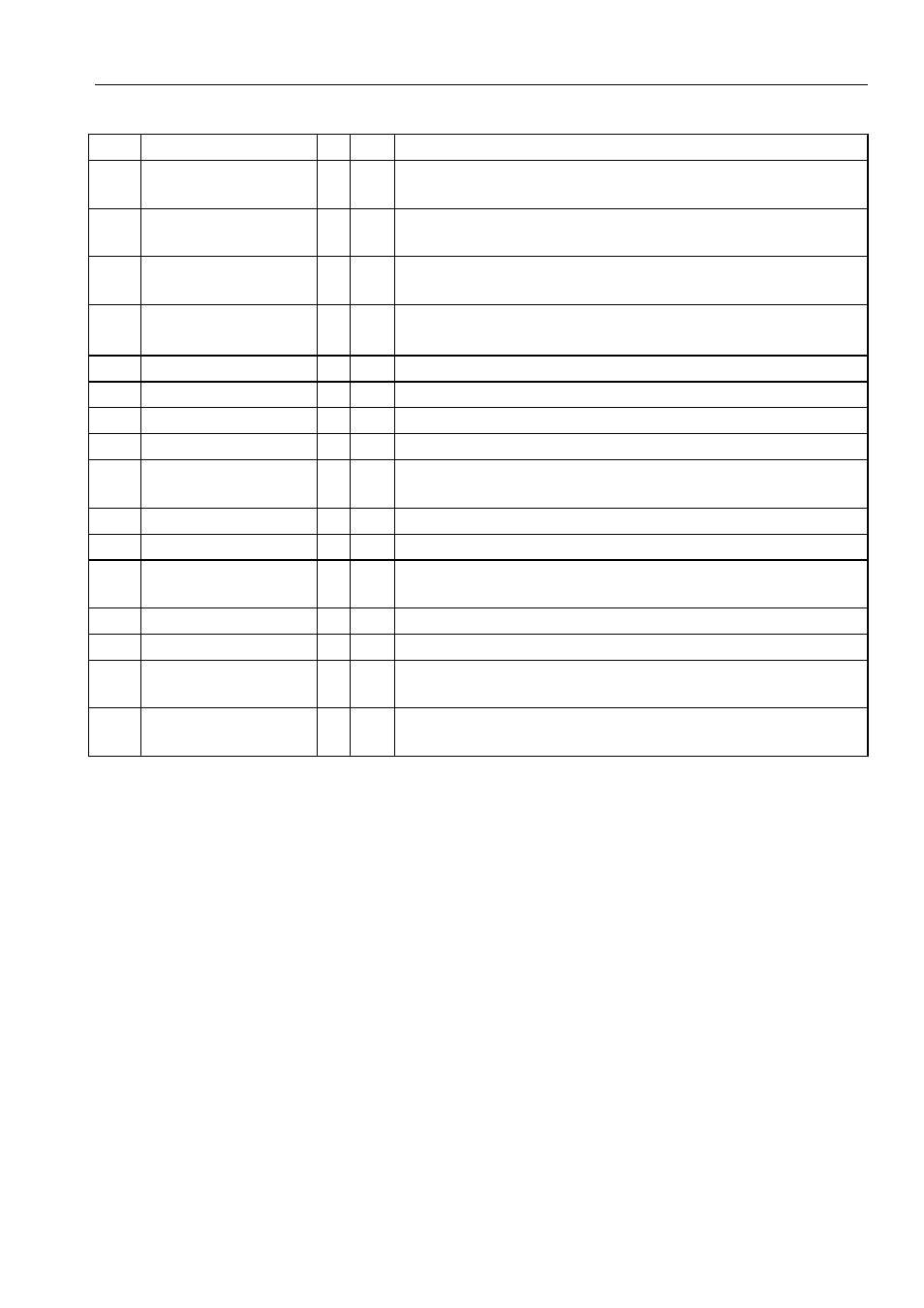
Var
Name
R
W
Range/default value
GI
Integrator Gain
(steady state)
Y
Y
0 to 1023 default depends on motor type
GP
Proportional Gain
(stiffness)
Y
Y
0 to 1023 default depends on motor type
GV
Velocity feedback
Gain (damping)
Y
Y
0 to 1023 default = 5
IC
Input/Output
Configuration
Y
Y
Input pull-up/down, output source/sink configuration
0, 256 (default) or 257, for brake input only
IM
Integral Mode
Y
Y
0=continuous (default)
IW
Integral Window
Y
Y
default 50
IX
Index Pulse
Y
Y
0 to 1023, default=250, motor definition dependent
PA
Position Actual
Y
N*
-2,147,483,648 to 0 to 2,147,483,647, default = 0
PC
Peak Current
Y
Y
Sets maximum drive output
value=scaling factor 100-400% of MC, default=300%
PE
Position Error
Y
N
+/- 32767
PF
Position Following
Y
Y
-2,147,483,648 to 0 to 2,147,483,647, default = 0
RV
ReVision of
software
Y
N
x.yy major.minor
SN
Serial number
Y
N
Drive serial number
ST
Status of indexing
Y
N
See Reporting the Status of Variables ST1,2,3 & 4
TL
Tracking Limit
Y
Y
0-65535, defaults to Motor Resolution or Motor
Resolution/100 if >65535
UF
User program
Fault status
Y
N
See Reporting of user faults UF1,2,3 & 4
*Can be set to 0 only.
Table 4-1. List of System Variables (Continued)