Fuji Bikes FRENIC 5000G11S/P11S User Manual
Page 86
5-39
H 2 2
P - G A I N
These functions are not generally used alone but are
combined like P control, PI control, PD control, and PID
control.
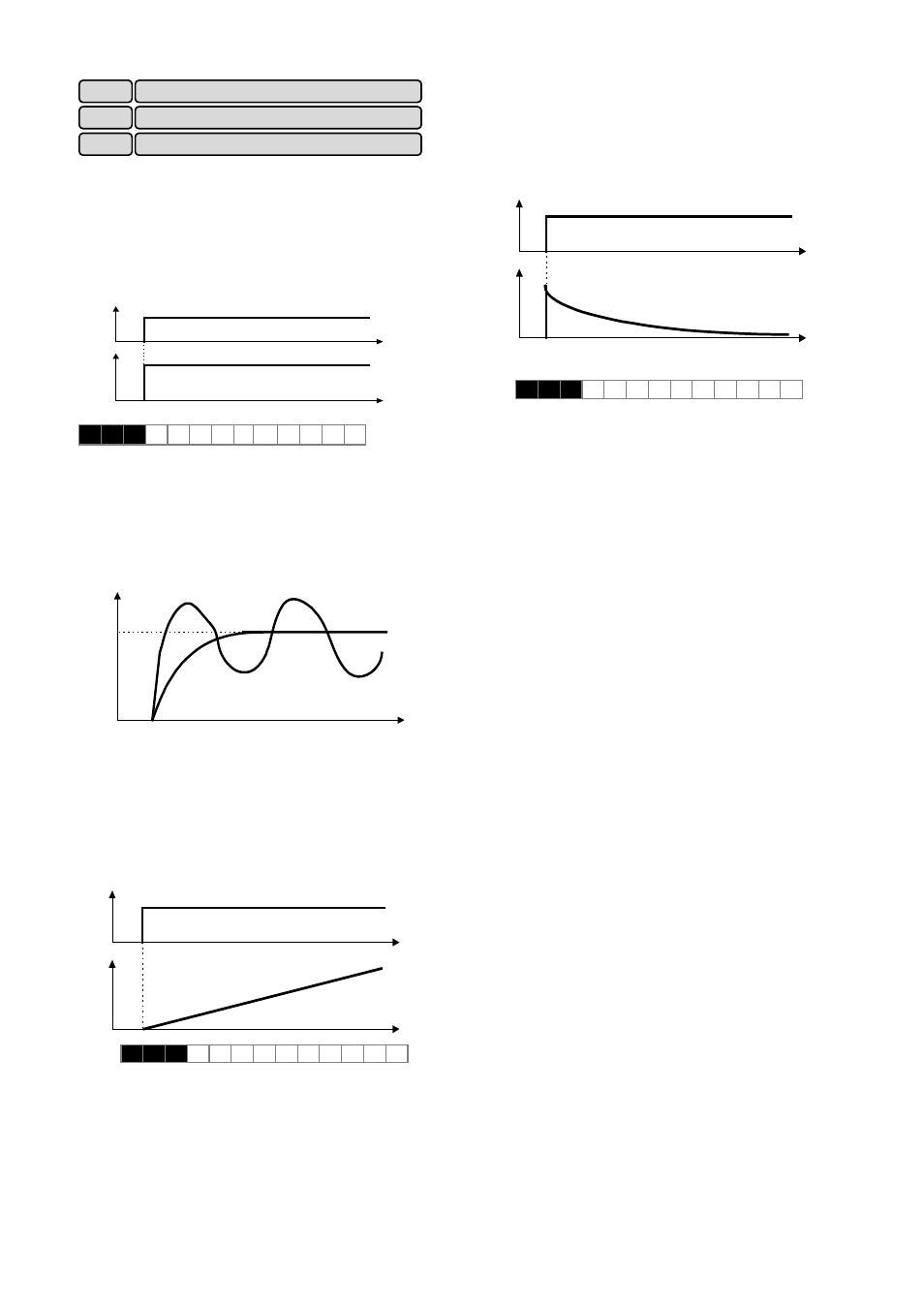
P operation
Operation using an operation amount (output frequency)
proportional to deviation is called P operation, which
outputs an operation amount proportional to deviation,
though it cannot eliminate deviation alone.
Time
Deviation
Operation
amount
Setting range: 0.01 to 10.0 times
P (gain) is the parameter that determines the response
level for the deviation of P operation. Although an
increase in gain speeds up response, an excessive gain
causes vibration, and a decrease in gain delays response.
The value "1" is the P(gain) that is when the maximum
frequency 100% at deviation 100%.
Time
Response
I operation
An operation where the change speed of the operation
amount (output frequency) is proportional to the
deviation is called an I operation. An I operation
outputs an operation amount as the integral of deviation
and, therefore, has the effect of matching the control
amount (feedback amount) to the target value (e.g., set
frequency), though it deteriorates response for significant
changes in deviation.
Time
De
vi
a
tio
n
Oper
ation
a
m
ount
Setting range: 0.0 (Inactive), 0.1 to 3600 seconds
"H23 I-gain" is used as a parameter to determine the effect
of I operation. A longer integration time delays response
and weakens resistance to external elements. A shorter
integration time speeds up response, but an integration
time that is too short causes vibration.
D operation
An operation where the operation amount (output
frequency) is proportional to the deviation differential is
called a D operation, which outputs an operation amount
as the deviation differential and, therefore, is capable of
responding to sudden changes.
Time
Deviation
Operation
amount
Setting range: 0.00 (Inactive), 0.01 to 10.0 seconds
"H24 D-gain" is used as a parameter to determine the
effect of a D operation. A longer differentiation time
causes vibration by P operation quickly attenuating at the
occurrence of deviation. Excessive differentiation time
could cause vibration. Shortening the differentiation
time reduces attenuation at the occurrence of deviation.
PI control
P operation alone does not remove deviation completely.
P + I control (where I operation is added to P operation)
is normally used to remove the remaining deviation. PI
control always operates to eliminate deviation even when
the target value is changed or there is a constant
disturbance. When I operation is strengthened,
however, the response for rapidly changing deviation
deteriorates. P operation can also be used individually
for loads containing an integral element.
PD control
If deviation occurs under PD control, an operation
amount larger than that of D operation alone occurs
rapidly and prevents deviation from expanding. For a
small deviation, P operation is restricted. When the
load contains an integral element, P operation alone may
allow responses to vibrate due to the effect of the integral
element, in which case PD control is used to attenuate
the vibration of P operation and stabilize responses. In
other words, this control is applied to loads in processes
without a braking function.
PID control
PID control combines the P operation, the I operation
which removes deviation, and the D operation which
suppresses vibration. This control achieves
deviation-free, accurate, and stable responses.
Adjusting PID set value
Adjust the PID value while monitoring the response
waveform on an oscilloscope or other instrument if
possible. Proceed as follows:
-Increase the value of "H22 P-gain" without generating
vibration.
- Decrease the value of "H23 I-gain" without generating
vibration.
- Increase the value of "H24 D-gain" without generating
vibration.
H 2 3
I -
G
A I N
H 2 4
D - G A I N
H22
PID control (P-gain)
H23
PID control (I-gain)
H24
PID control (D-gain)