Brake release button on mb-40r/emb-40r – Adept s350 Cobra User Manual
Page 39
Chapter 4: MotionBlox-40R
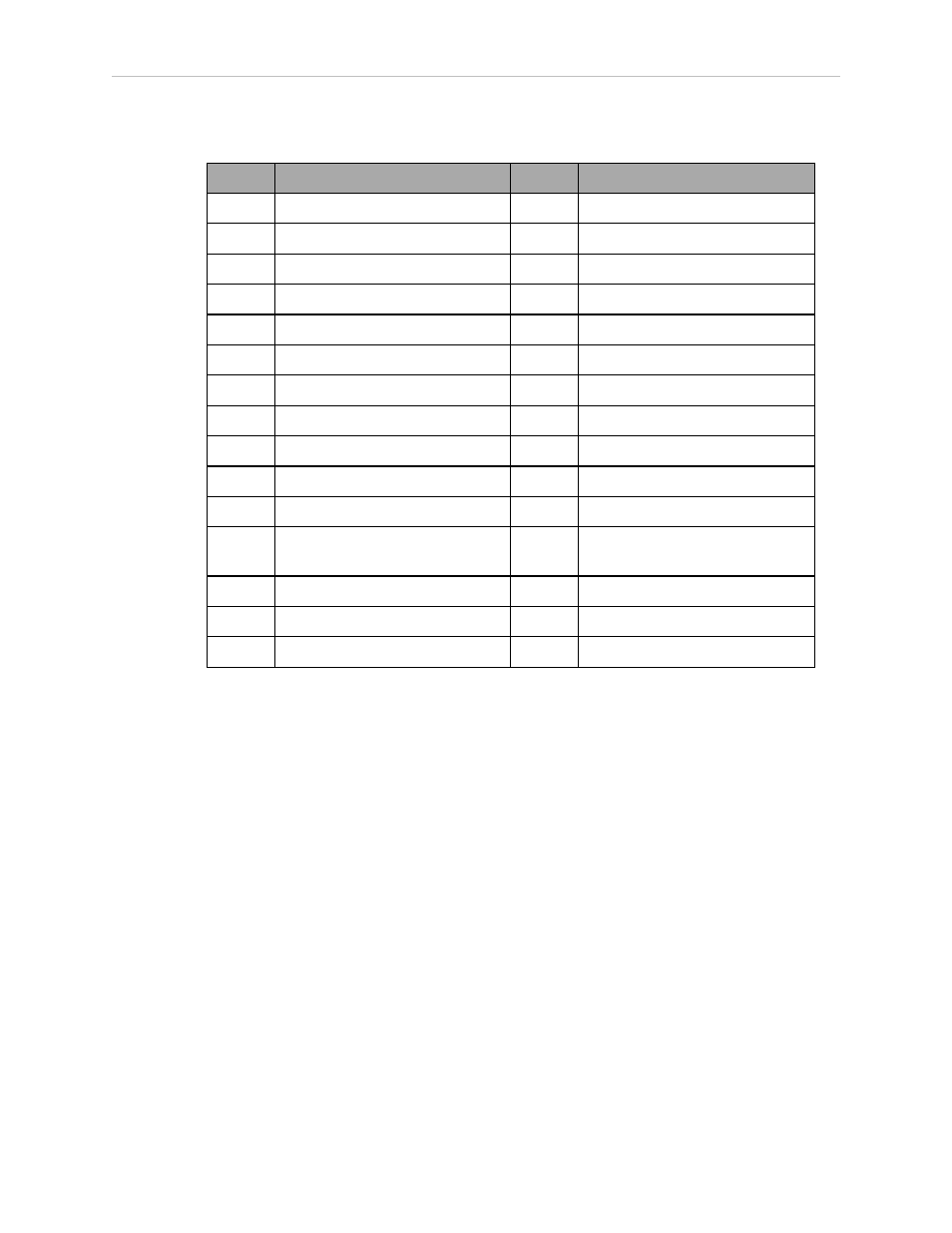
Table 4-3. Status Panel Codes
LED
Status Code
LED
Status Code
OK
No Fault
H#
High Temp Encoder (Joint #)
ON
High Power ON Status
hV
High Voltage Bus Fault
MA
Manual Mode
I#
Initialization Stage (Step #)
24
24 V Supply Fault
M#
Motor Stalled (Joint #)
A#
Amp Fault (Joint #)
NV
Non-Volatile Memory
B#
IO Blox Fault (Address #)
P#
Power System Fault (Code #)
BA
Backup Battery Low Voltage
PR
Processor Overloaded
AC
AC Power Fault
RC
RSC Fault
D#
Duty Cycle Exceeded (Joint #)
S#
Safety System Fault (Code #)
E#
Encoder Fault (Joint #)
SE
E-Stop Delay Fault
ES
E-Stop
SW
Watchdog Timeout
F#
External Sensor Stop
T#
Safety System Fault
(Code 10 + #)
FM
Firmware Mismatch
TR
Teach Restrict Fault
FW
1394 Fault
V#
Hard Envelope Error (Joint #)
h#
High Temp Amp (Joint #)
NOTE: Due to the nature of the Cobra s350 bus line encoder wiring, a single
encoder wiring error may result in multiple channels of displayed encoder errors.
Reference the lowest encoder number displayed.
For more information on status codes, go to the Adept Document Library on the Adept website,
and in the Procedures, FAQs, and Troubleshooting section, look for the Adept Status Code
Summary document.
Brake Release Button on MB-40R/eMB-40R
The Brake Release button is located at the top right of the MB-40R/eMB-40R, as shown in
Figure 4-4. Under some circumstances you may want to manually position Joints 3 and 4
without turning on high power. You can use the Brake Release button for this purpose.
When 24 V power is enabled, pressing this button releases the brake, which allows movement
of Joints 3 and 4. An additional Brake Release button is provided on the robot. For details, see
Brake Release Button on page 51.
NOTE: If this button is pressed while high power is on, high power will
automatically shut down.
Adept Cobra s350 User's Guide, Rev. D
Page 39 of 94