Fig 5.16 pid feedback response characteristics, B5-04 integral limit setting, B5-06 pi output limit – Yaskawa E7L Drive Bypass User Manual
Page 122: B5-07 pi offset adjustment, Programming 5 - 30
Programming 5 - 30
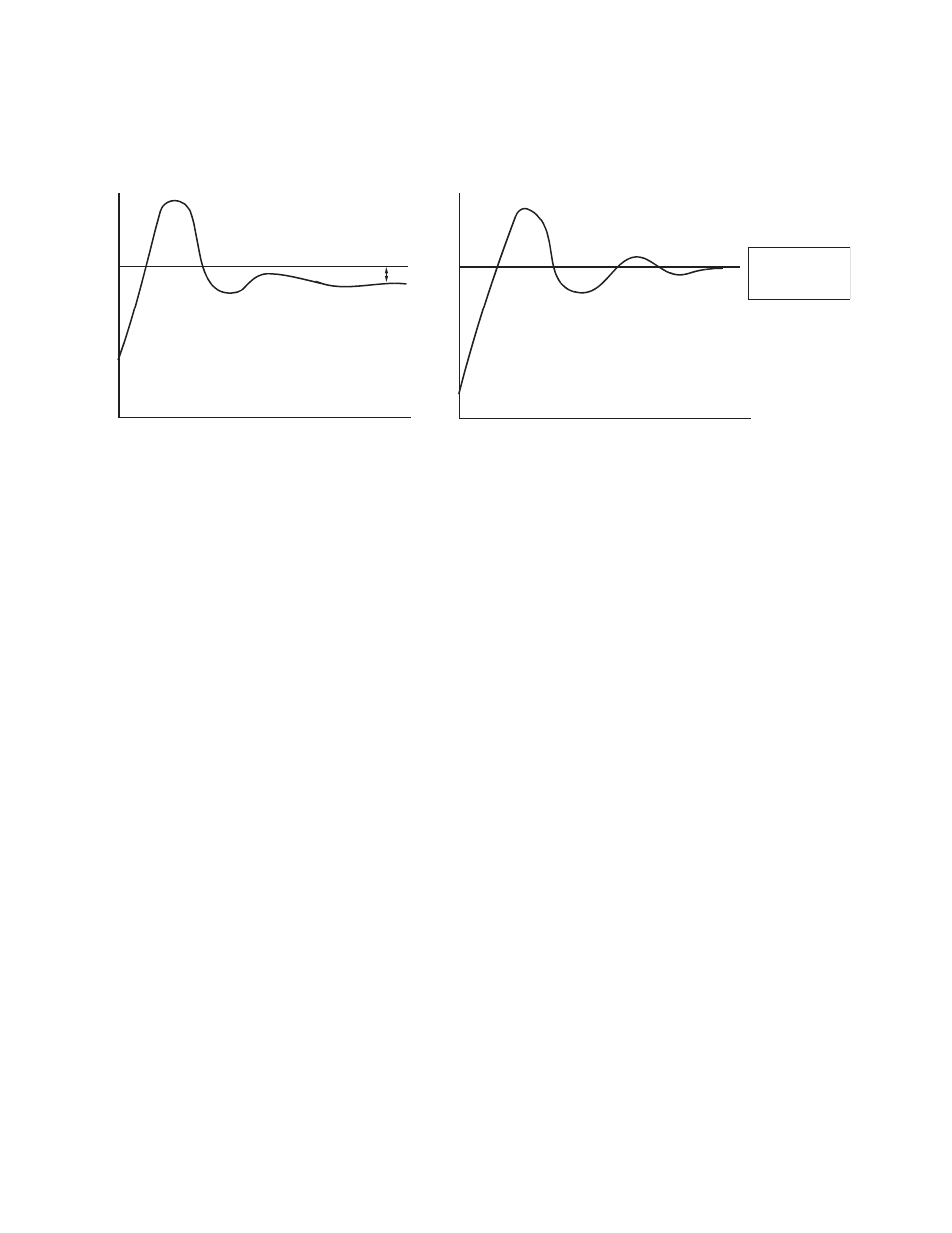
The Integral factor of PI functionality is a time-based gain that can be used to eliminate the error (difference between the
setpoint and feedback at steady state). The smaller the Integral Time set into b5-03, the more aggressive the Integral factor will
be. To turn off the Integral Time, set b5-03= 0.00.
Fig 5.16 PID Feedback Response Characteristics
b5-04 Integral Limit Setting
Setting Range:
0.0 to 100.0%
Factory Default: 100.0%
On some applications, especially those with rapidly varying loads, the output of the PI function may have large oscillations. To
suppress these oscillations, a limit can be applied to the integral factor by programming b5-04.
b5-06 PI Output Limit
Setting Range:
0.0 to 100.0%
Factory Default: 100.0%
Places a cap on the output of the PI function. Limiting the PI function may help to prevent large overshoots in the Drive’s
response to error (the difference between the setpoint and the feedback).
b5-07 PI Offset Adjustment
Setting Range:
-100.0% to +100.0%
Factory Default: 0.0%
The PI Offset Adjustment parameter has two different uses. Parameter b5-07 serves different functions depending on whether
it is used on a standard PI loop or a Differential PI loop.
Parameter b5-07 causes an offset to be applied to the output of the PI function in a non-differential PI loop. Every time the PI
output is updated, the offset (b5-07) is summed with the PI output. This can be used to artificially kick-start a slow starting PI
loop.
If the Drive is configured for Differential PI Regulation (H3-09= “16: PI Differential”), then this parameter is the target set-
point for the differential to be maintained between the signal measured on analog input A1 and the signal measured on analog
input A2.
Zero
offset with
Integral Action
No Integral
With Integral
Me
asur
ed
Fe
ed
back
Mea
sur
ed
Fe
edb
ack
Setpoint
Offset
Setpoint
Feedback
Feedback
TIME
TIME