Velocity control, Figure 15, Non-cyclic scaling – HEIDENHAIN PROFIBUS-DP (DPV0) User Manual
Page 38
Encoder and Gateway functionality, DPV0
38
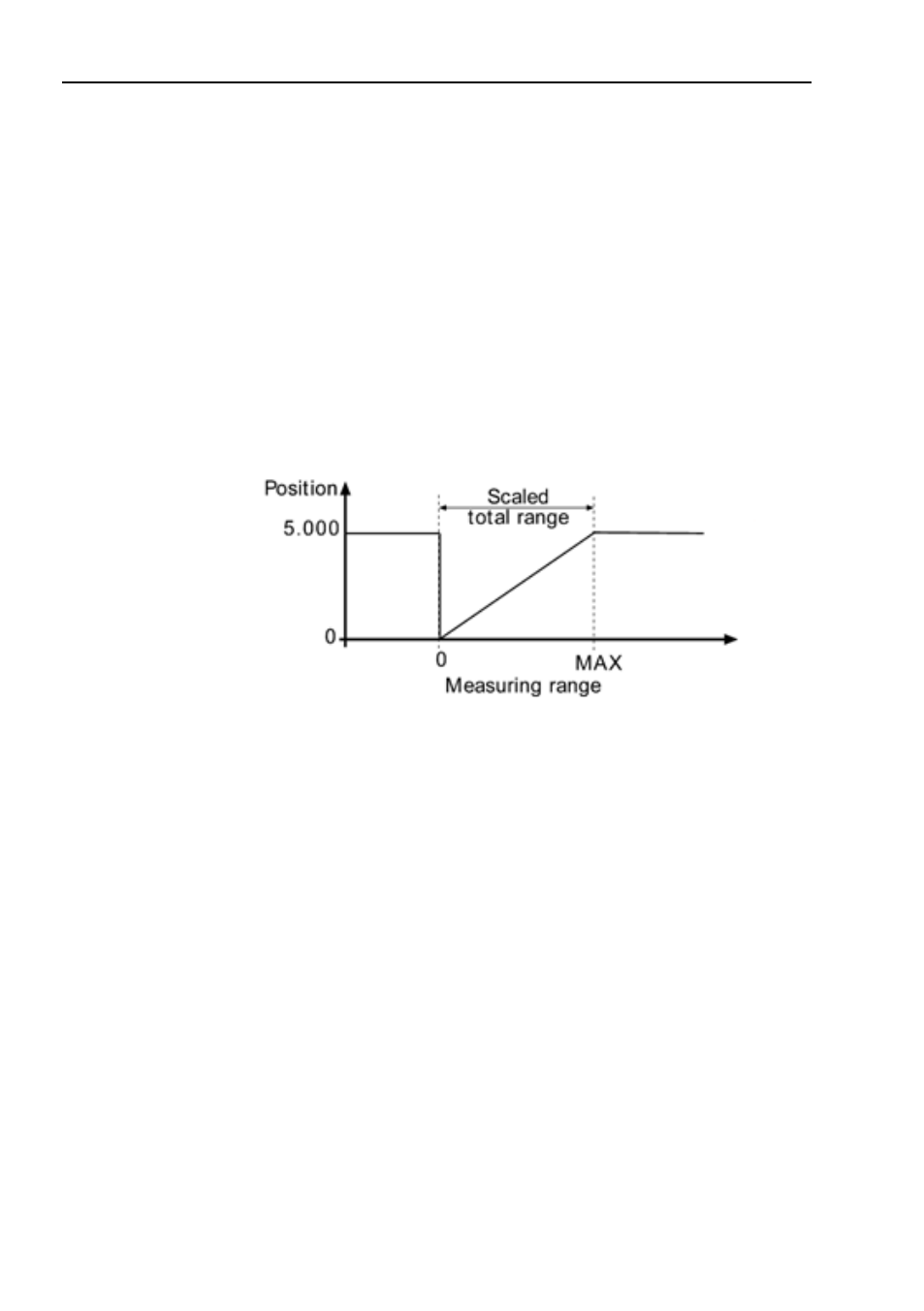
B. Non-cyclic scaling
If the measuring range is used to limit the encoder value
range to a value not equal to the specified singleturn
resolution * 2
X
, the output position value is limited within the
operating range. If the position value increases or decreases
outside the measuring range by rotating the encoder shaft
beyond the maximum value or below 0, the device outputs
the total measuring range value.
Example of non-cyclic scaling:
Measuring units per revolution = 100
Total measuring range = 5000 (number of revolutions 50)
Figure 15
Non-cyclic scaling
5.4.7
Velocity control
The velocity data can be accessed if
class 2 32-bit + velocity configuration is used. In this case the
input data consists of 32-position data plus 16-bit signed velocity
data. The input velocity value is negative in CCW direction if code
sequence is set to CW. If the measured velocity is higher then
what is possible to present with the selected velocity unit the
value is set to 0x7FFF (32768) or 0x8000 (-32768) depending on
direction of shaft rotation.
Note:
If the velocity control function is used and scaling is
set to the device the velocity calculation is based
on the scaled position value. Consequently the
accuracy of the velocity value is dependent of the
scaling set to the device.