Safe torque-off header configurations – Rockwell Automation 2099-BMxx-S Kinetix Safe Torque-off Feature Safety Reference Manual User Manual
Page 17
Rockwell Automation Publication GMC-RM002F-EN-P - June 2013
17
Safe Torque-off Connector Data Chapter 2
Safe Torque-off Header
Configurations
The safe torque-off function can be implemented in a single-drive or extended in
up to eight drives in a multiple safety-drive configuration. The connector can also
be jumpered to effectively remove the safe torque-off function.
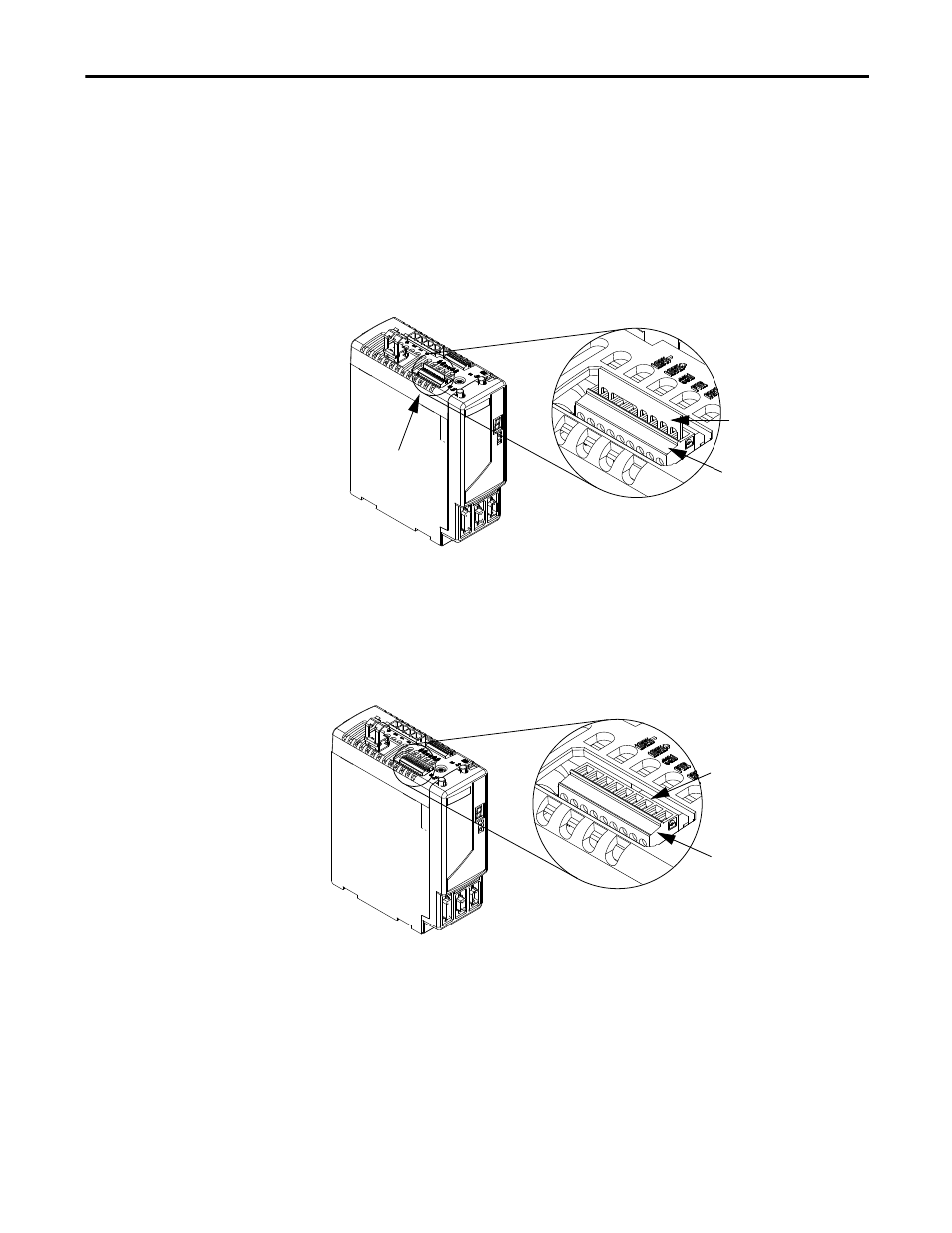
In this example, the Kinetix 6000 axis module is shown with the motion-allowed
jumper installed in the wiring plug header. This header/jumper combination
(default configuration) ships with each Kinetix 6000 and Kinetix 7000 drive and
enables drive operation without external safety-circuit connections.
Figure 6 - Motion-allowed Jumper
In this example, the Kinetix 6000 axis module is shown with a wiring plug header.
The motion-allowed jumper has been removed. Use the wiring plug header alone
for wiring Kinetix 6000 and Kinetix 7000 single drive safe torque-off
applications.
Figure 7 - Single Drive Wiring Header
1
1 2 3 4 5 6 7 8 9
Kinetix 6000 or Kinetix 7000 Drive
(Kinetix 6000 axis module is shown)
Motion-allowed Jumper
Wiring Plug Header
Safe Torque-off
(STO) Connector
1 2 3 4 5 6 7 8 9
Kinetix 6000 or Kinetix 7000 Drive
(Kinetix 6000 axis module is shown)
Safe Torque-off terminals for
input wiring (STO-1…STO-7).
Wiring Plug Header