Rockwell Automation 2099-BMxx-S Kinetix Safe Torque-off Feature Safety Reference Manual User Manual
Page 14
14
Rockwell Automation Publication GMC-RM002F-EN-P - June 2013
Chapter 1 Safety Concept and Troubleshooting
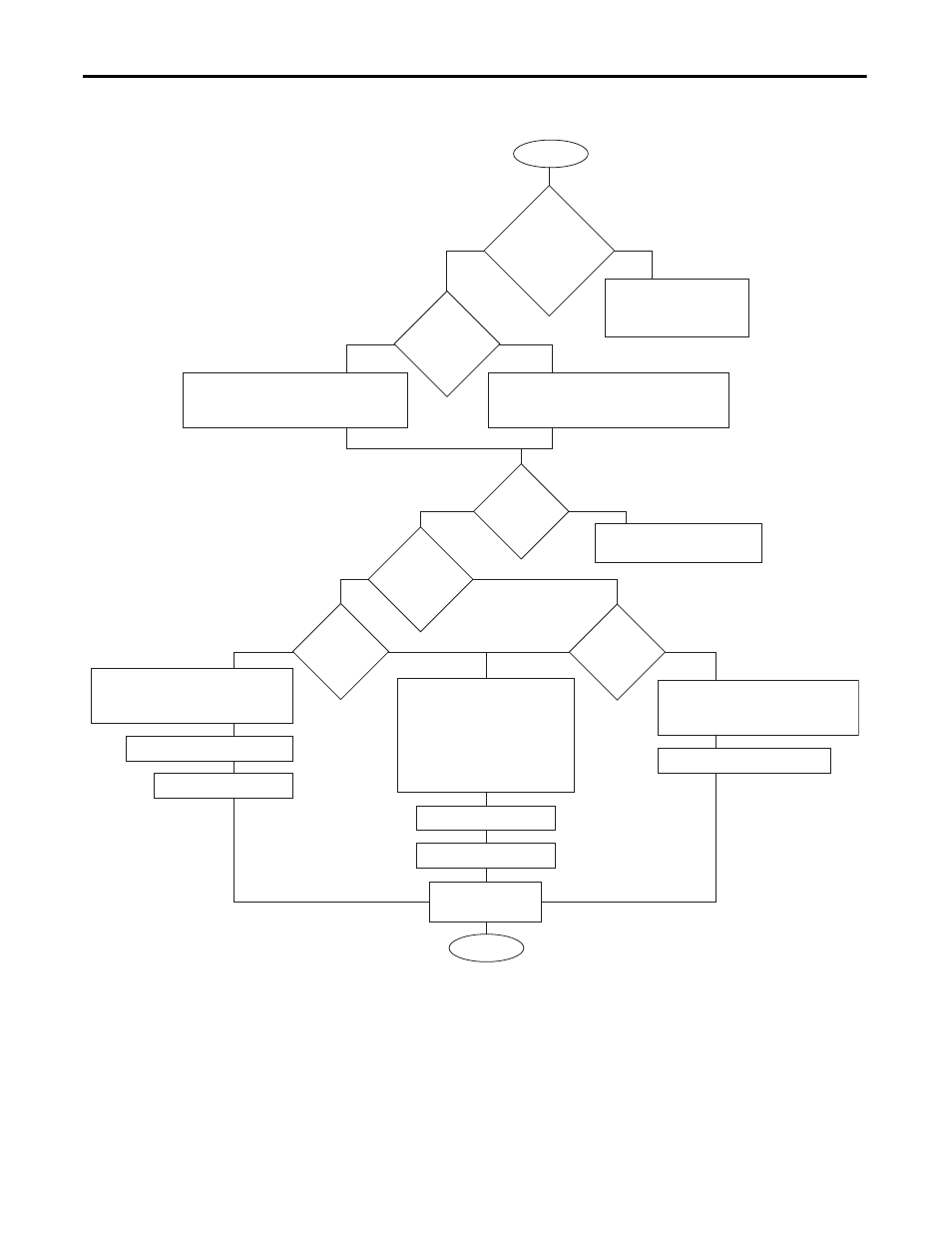
Figure 3 - Advanced Safe Torque-off Troubleshooting Flowchart
(1) This is a safe torque-off condition because the safe torque-off status bit is set to 1 without an E49 error code. After the condition is
fixed, the motion planner must be signaled that the position loop has opened in the condition state with a Motion Servo Off (MSF)
instruction before the next Motion Servo On (MSO) instruction can take place. The MSF instruction is necessary because the drive is
enabled and running.
(2) This is also a safe torque-off condition (the safe torque-off status bit is set to 1 without an E49 error code). The safe torque-off
condition must be resolved, but because the drive is not enabled and running the MSF instruction is not necessary.
1
0
Go to RSLogix 5000 software>Motion Group>
Axis_Servo_Drive tag name>Monitor Axis tag>
Axis_Servo_Drive.SafeOffModeActiveStatus GUI.
Go to RSLogix 5000 software>Motion Group>
Axis_Servo_Drive tag name>Monitor Axis tag>
Axis_Servo_Drive.DriveStatus bit 14.
Refer to user manual for
troubleshooting Bulletin 2094
drives without safe torque-off.
Start
Bulletin 2099 or
Bulletin 2094 with safe
torque-off (-S) drive?
RSLogix 5000
software
v15 or v16?
Yes
No
Yes
No
2
Yes
No
Yes
No
1
Safe Torque-off fault exists.
Mismatch occurred outside
of the 100 ms response time.
Drive Status Indicator = Steady Red.
DriveHardFault and Axis Shutdown
in RSLogix 5000 software.
Safe Torque-off
status bit
1 or 0?
Was the axis
enabled prior to
reading bit?
No safe torque-off fault or condition.
Both inputs energized within 100 ms.
Was error code
E49 displayed?
Was error code
E49 displayed?
Safe Torque-off condition exists through
normal operation. Both inputs de-energized
within 100 ms of each other.
Resolve safe torque-off condition.
Safe Torque-off condition exists through
normal operation. Both inputs de-energized
within 100 ms of each other.
Resolve safe torque-off condition.
Complete MSF
1
instruction.
Complete MASR instruction.
Resolve safe torque-off fault.
MSO instruction or
next program step.
Finish
v15
v16 (or later)