H.004 slip compensation, H.003 torque boost voltage – Rockwell Automation GV3000/SE 230VAC 1-20 HP GP & Vector Drive Ver. 6.04 Software Start-Up and Ref. User Manual
Page 145
4-59
Programming Reference
The level of increased output frequency is a function of the value entered in H.004
and the motor current.
Actual motor shaft speed is determined by two factors: inverter output frequency
and the slip of the motor. The speed reference is converted into output frequency.
Motor slip varies with load and is determined by the type of induction motor.
At rated load, slip compensation measures inverter output current and increases the
output frequency by the percentage entered in H.004. Below rated load, slip
compensation will increase inverter output frequency by the percentage in H.004
multiplied by the percent of rated load.
Because of load changes, the long-term speed behavior of the motor is greatly
improved through the use of this parameter.
To calculate the value entered for H.004, use the following equation:
Synchronous RPM - Nameplate RPM Max Power Module Amps
Synchronous RPM Motor Nominal Current
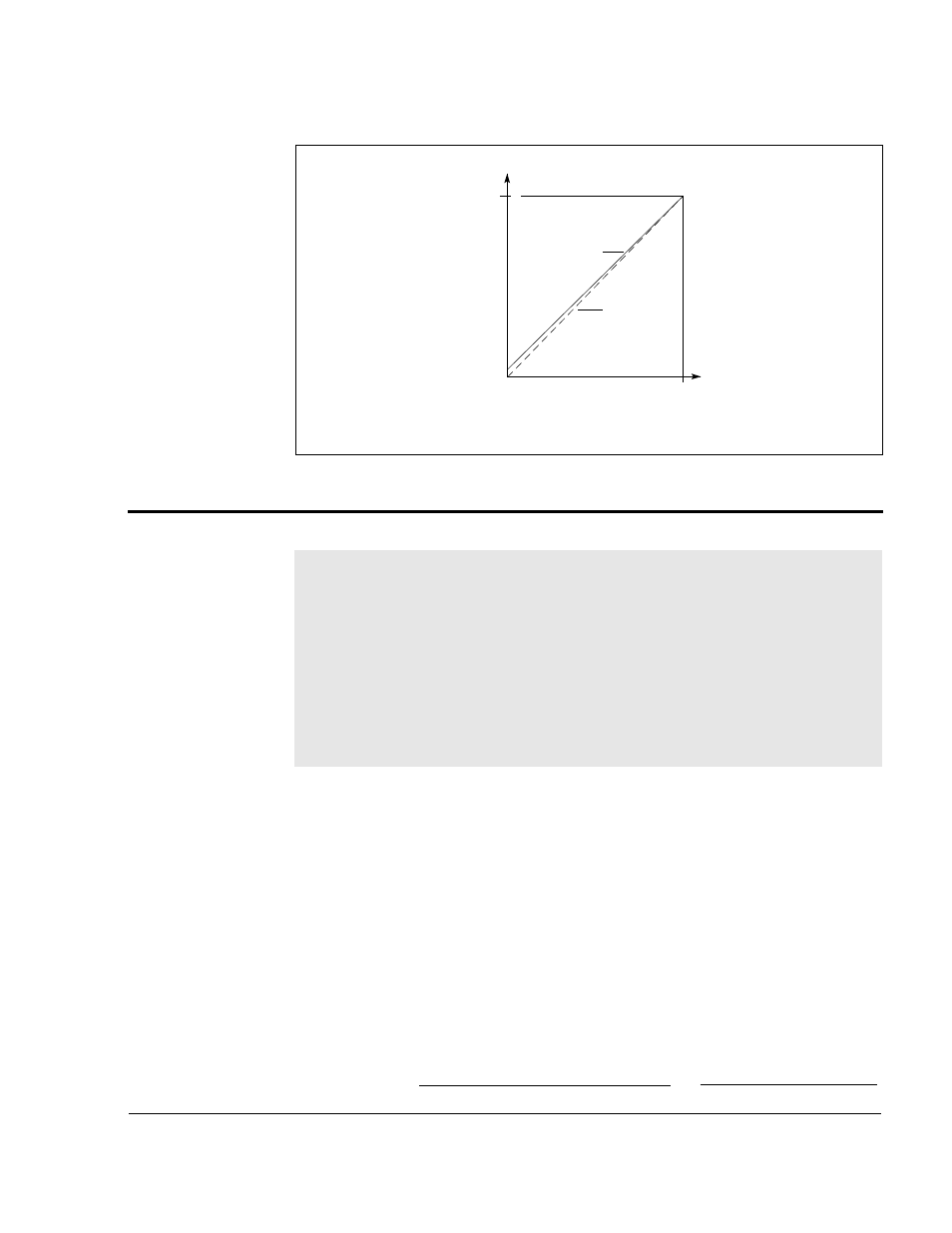
H.003 Torque Boost Voltage
(continued)
Figure 4.11 – Torque Boost Voltage
H.004 Slip Compensation
Parameter Range:
0.00% to 10.00% of base frequency (H.001)
Default Setting:
0.00% (no slip compensation)
Parameter Type:
Tunable
Refer also to parameters: P.095 Power Module Output Amps
H.001 Motor Nameplate Base Frequency
H.004 = 100 x x
100
Voltage
Output
%
Output Frequency
(Hz)
1
0
Torque Boost
H.003 = 1%
Constant
V/Hz
Ratio
Base Frequency
This parameter is
used to improve
motor speed
regulation by
increasing the output
frequency applied to
the motor (the
percentage of
frequency rise at
Power Module Output
Amps (P.095)).