3 mechanical dancer, 4 open loop torque – Rockwell Automation 9329 Drive Application Software Tension Control Gen. Units User Manual
Page 10
FM – Tension Control
Drive Application Software – page 10 of 52
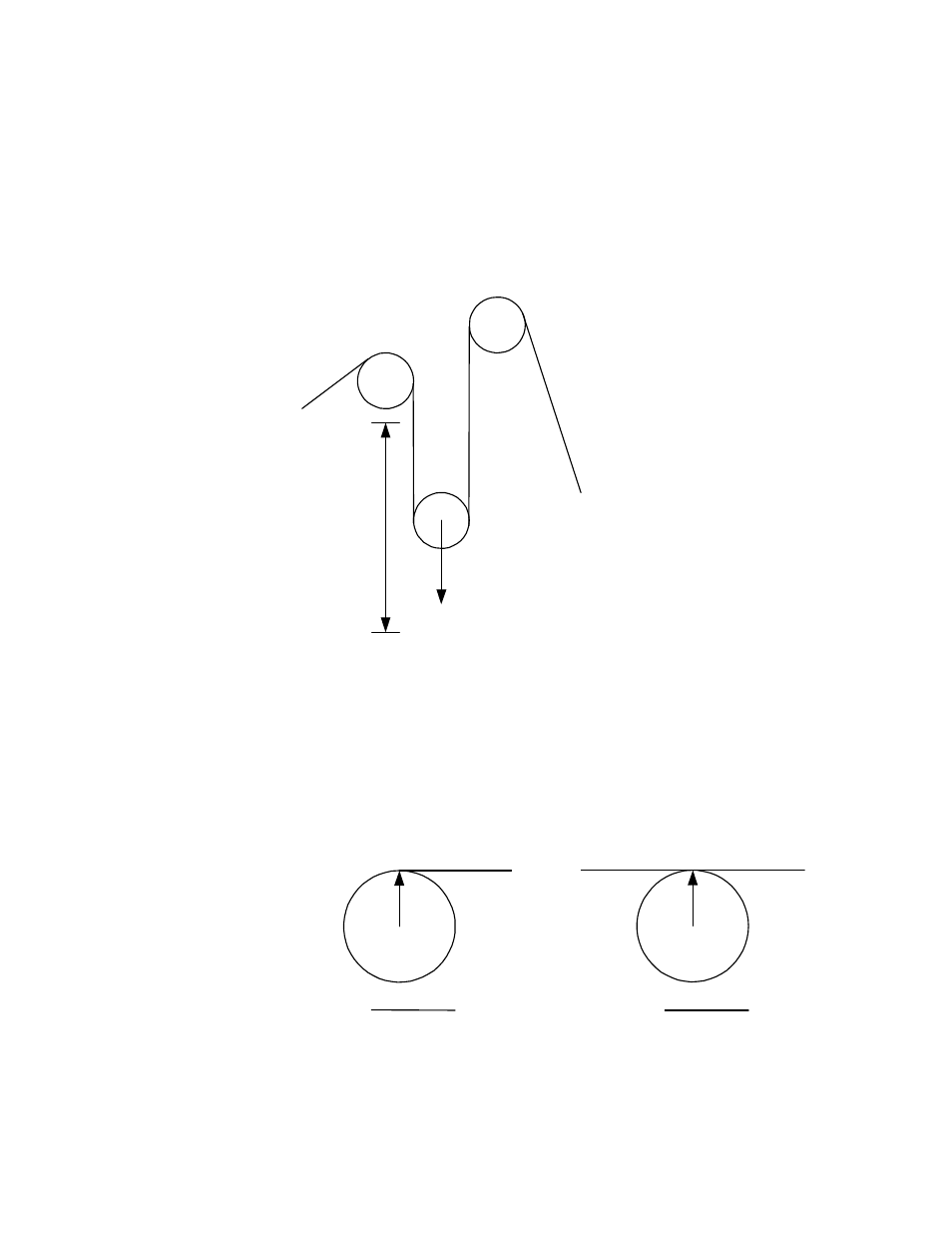
3.3 Mechanical Dancer
A dancer is a mechanical device that applies force to the web. The force could be a weight,
air pressure, or hydraulic pressure. If there is any difference in speed between the two
sections, the dancer will move. If the speed of the out going section is greater than the speed
of the incoming section the Dancer will move up and have less stored web. If the speed of
the out going section is less than the incoming section the Dancer will move down and will
store more web. The Tension Control Function Module monitors the dancer position and
adjusts the driven section to maintain the dancer at a user specific position (typically 50%
travel).
3.4 Open Loop Torque
Open loop torque does not require a tension or position feedback device. The amount of
torque required to change the tension between rolls may be calculated. The difference in
tension between sections plus losses is converted into percent motor torque. For Unwind
and Rewinds, the amount torque required is the tension required plus losses converted into
percent motor torque.
Force
Travel
Range
Dancer
Idler
Idler
T1
T1
T2
R
R
Winder / Unwind
Inline Tensioning
R = Radius in feet
G = Gear Ratio
T
mr
= Torque Motor Rated
% Torque =
* 100
T1
R * G * T
mr
% Torque =
* 100
(T1 - T2)
R * G * T
mr