10 - reference, Introduction, Motor output speed/torque/horsepower – Rockwell Automation 150 MNL/SMC DIALOG+/APP-PROD GUIDE User Manual
Page 163: Torque and horsepower, Reference, Chapter
Chapter
10
Reference
Introduction
Certain mechanical parameters must be taken into consideration when
applying motor controllers. The following section explains thes
parameters and how to calculate or measure them.
Motor Output
Speed/Torque/Horsepower
The speed at which an induction motor operates depends on the input
power frequency and the number of poles for which the motor is
wound. The higher the frequency, the faster the motor runs. The
more poles the motor has, the slower it runs. To determine the
synchronous speed of an induction motor, use the following equation:
Actual full-load speed (the speed at which the motor will operate at
nameplate rated load) will be less than synchronous speed. This
difference between synchronous speed and full-load speed is called
slip. Percent slip is defined as follows:
Induction motors are built with slip ranging from less than 5% to as
much as 20%. A motor with a slip of less than 5% is called a normal
slip motor. Motors with a slip of 5% or more are used for applications
requiring high starting torque.
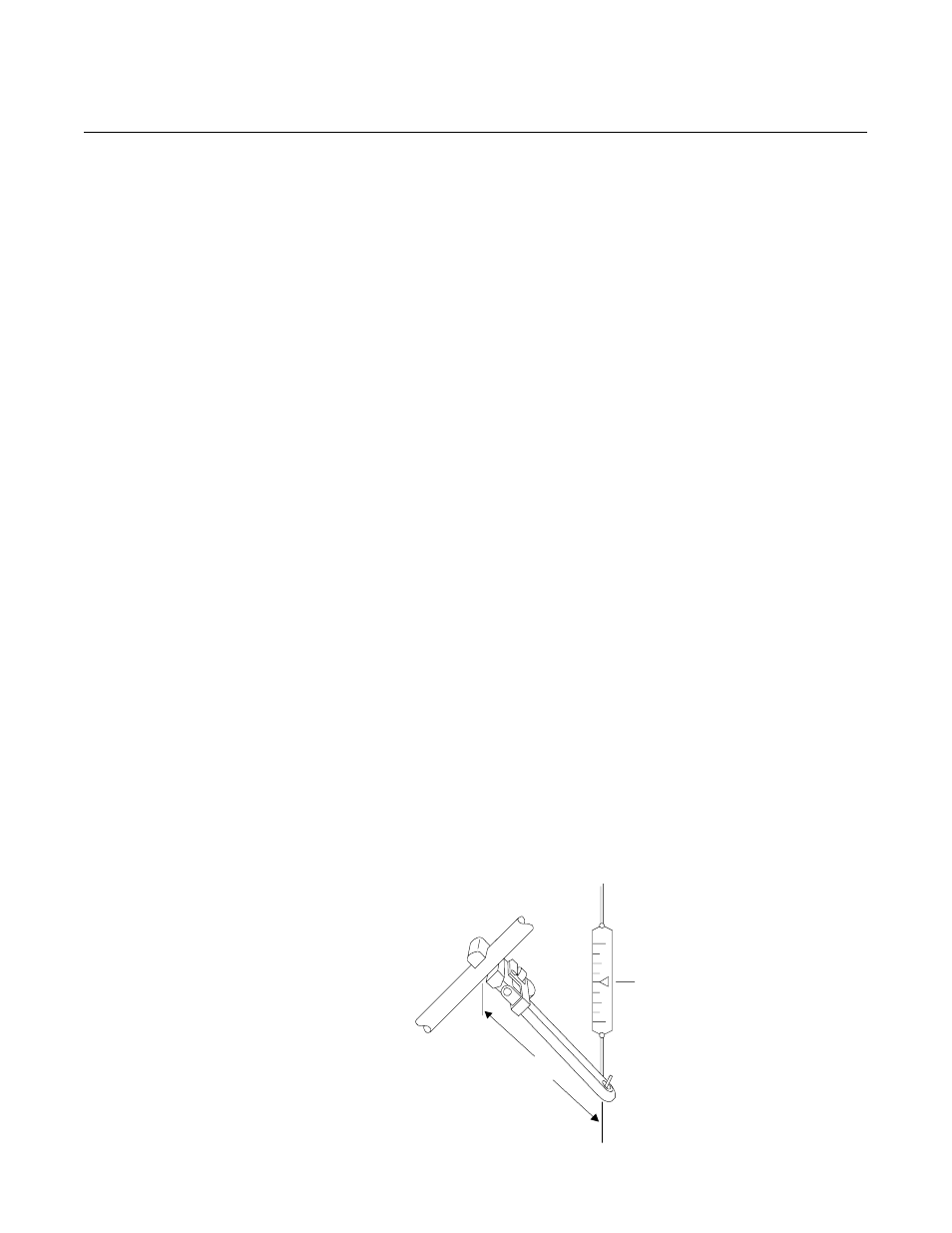
Torque and Horsepower
Torque and horsepower, two important motor characteristics,
determine the size of the motor required for a given application. Th
difference between the two can be explained using a simple
illustration of a shaft and wrench.
Figure 10.1 Shaft and Wrench
Synchronous Spee
60
2
×
Frequenc
×
Number of Poles
-----------------------------------------
=
Percent Sli
Synchronous Speed
Full Load String
–
Synchronous Speed
--------------------------------------------------------------------------------
100
×
=
One Pound
One Foot