Smb smart motor braking, Preset slow speed, Smb smart motor braking – Rockwell Automation 150 MNL/SMC DIALOG+/APP-PROD GUIDE User Manual
Page 138
5-14
SMC Dialog Plus Controller Special Application Considerations
Motor Torque Capabilities
with SMC Dialog Plus
Controller Options
SMB
Smart Motor Braking
The stopping torque output of the SMC Dialog Plus controller will
vary depending on the braking current setting and motor
characteristics. Typically the maximum stopping torque will b
between 80–100% of the full load torque of the motor when set at
400% braking current.
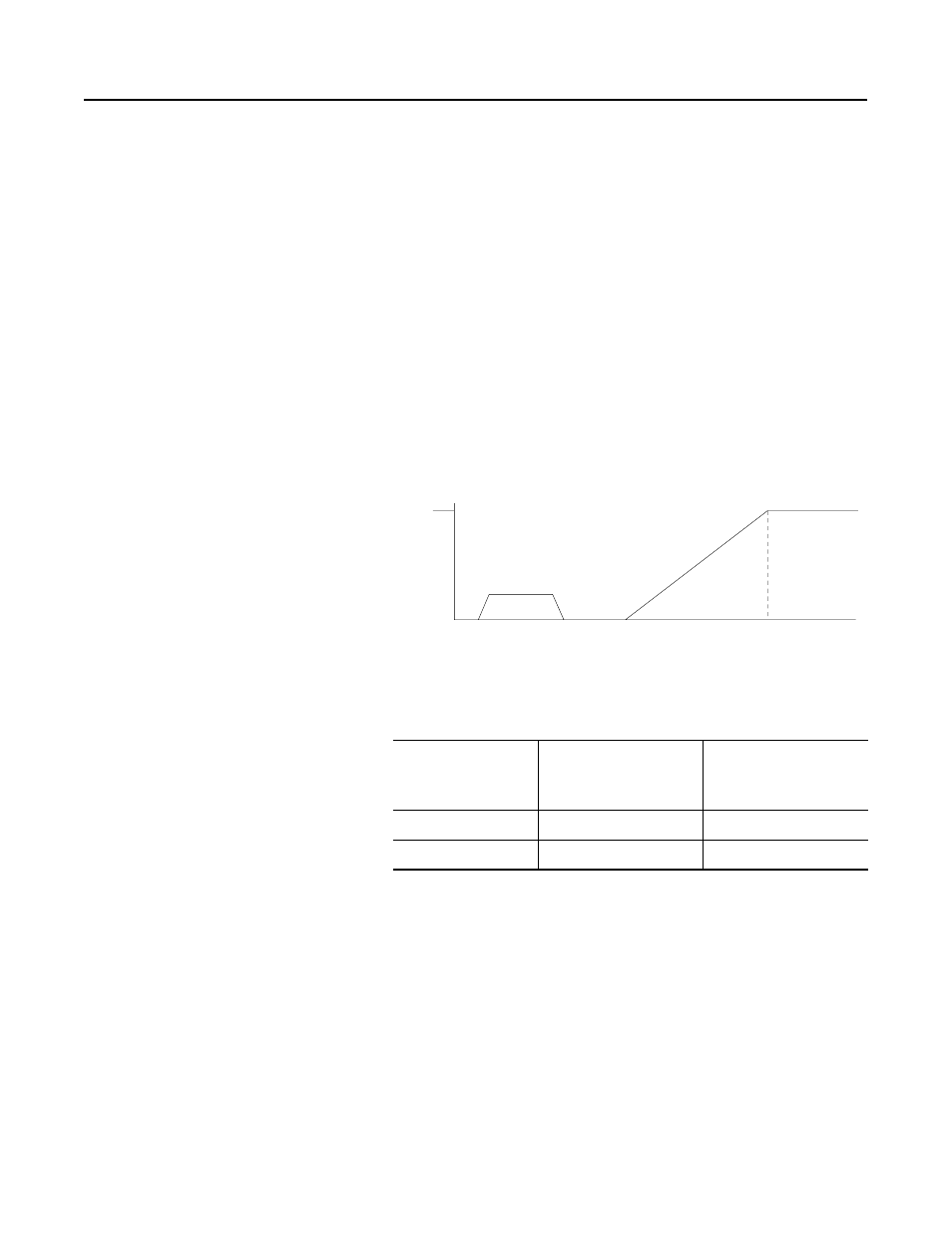
Preset Slow Speed
Two torque characteristics of the Preset Slow Speed option must be
considered. The first is the starting torque. The second is th
available running torque at low speed (see Figure 5.11). These torqu
characteristics will also vary, depending on the speed selected. Refe
to Table 5.J for the approximate maximum available starting and
running full load torque at maximum current settings. On
adjustment (Slow Speed Current) will control the starting and running
torque values.
Figure 5.11 Starting and Running Torque
Table 5.J
Maximum Torque at Maximum Current Settings
③
Values may vary based on motor types.
Preset Slow Speed
Maximum Starting Torque
as a Percentage of
Full Load Torque
Maximum Running Torque
as a Percentage of
Full Load Torque
7%
90–100%
110–120%
15%
50%
100%
10
0
Motor
Speed
7 or 15%
Time (seconds)
➀ Starting torque
➁ Running torque
➁
➀