Rockwell Automation 150 MNL/SMC DIALOG+/APP-PROD GUIDE User Manual
Page 156
Reduced Voltage Starting
8-3
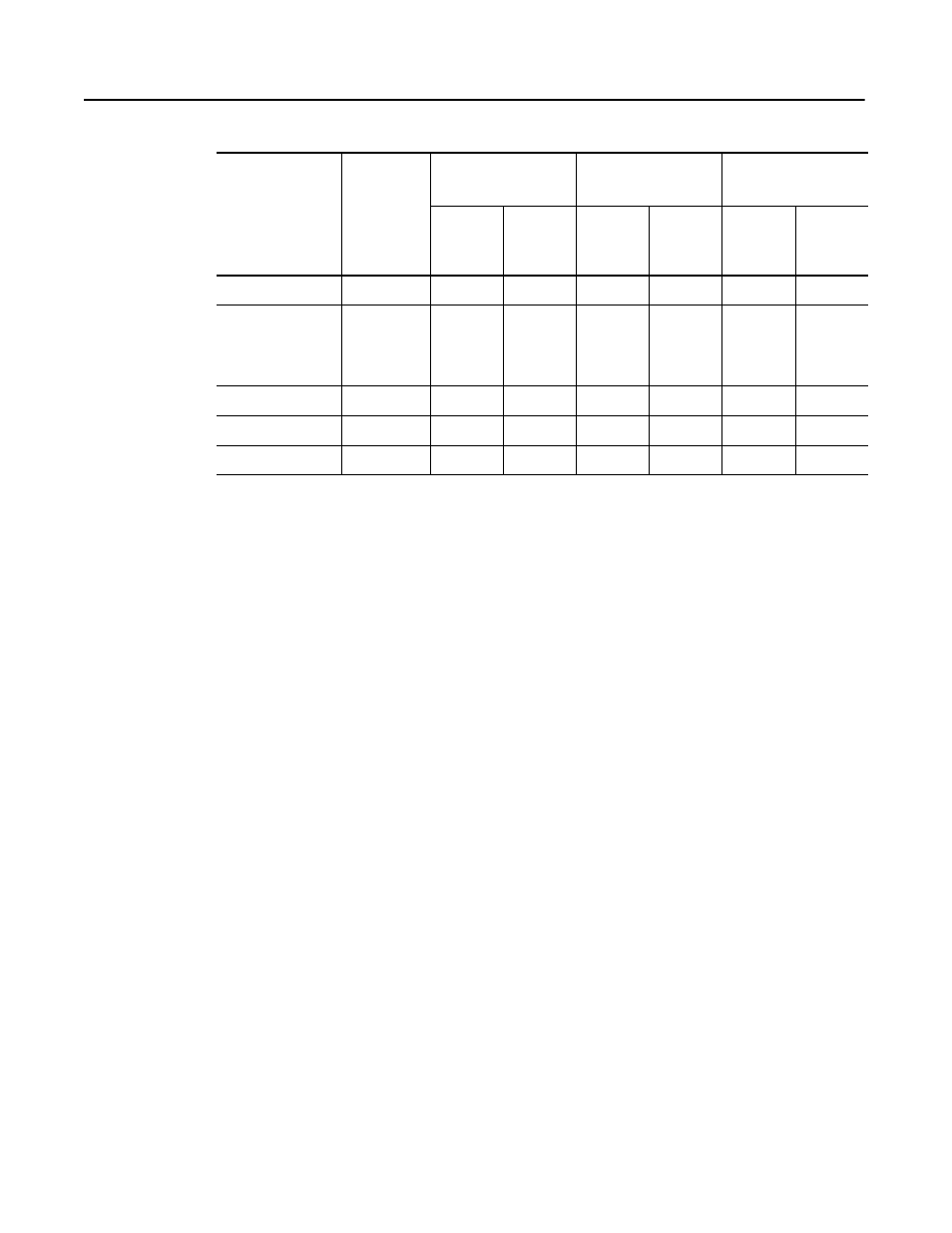
Table 8.K
Typical Voltage, Current and Torque Characteristics for NEMA
Design B Motors
With the wide range of torque characteristics for the various starting
methods, selecting an electromechanical reduced voltage starter
becomes more application dependent. In many instances, available
torque becomes the factor in the selection processes.
Limiting line current has been a prime reason in the past for using
electromechanical reduced voltage starting. Utility current
restrictions, as well as in-plant bus capacity, may require motors
above a certain horsepower to be started with reduced voltage. Som
areas of the world require that any motor above 7-1/2 HP be started
with reduced voltage.
Using reduced voltage motor starting also enables torque control.
High inertia loads are a good example of an application in which
electromechanical reduced voltage starting has been used to control
the acceleration of the motor and load.
Electromechanical reduced voltage starters must make a transition
from reduced voltage to full voltage at some point in the starting
cycle. At this point, there is normally a line current surge. The
amount of surge depends upon the type of transition being used and
the speed of the motor at the transition point.
Starting
Method
% Voltage at
Motor
Terminals
Motor Starting
Current as a % of:
Line Current
as a % of:
Motor Starting
Torque as a % of:
Locked
Rotor
Current
Full
Load
Current
Locked
Rotor
Current
Full
Load
Current
Locked
Rotor
Torque
Full
Load
Torque
Full Voltage
100
100
600
100
600
100
180
Autotrans.
80% tap
65% tap
50% tap
80
65
50
80
65
50
480
390
300
64
42
25
384
252
150
64
42
25
115
76
45
Part Winding
100
65
390
65
390
50
90
Wye-Delta
100
33
198
33
198
33
60
Solid-state
0–100
0–100
0–600
0–100
0–600
0–100
0–180