Control and status word profidrive, Control and status word profidrive -3 – Rockwell Automation 160PD1 160 Profibus Communication Module User Manual
Page 23
Profibus Parameter Descriptions and Data Protocol
5–3
Control and Status Word
PROFIDRIVE
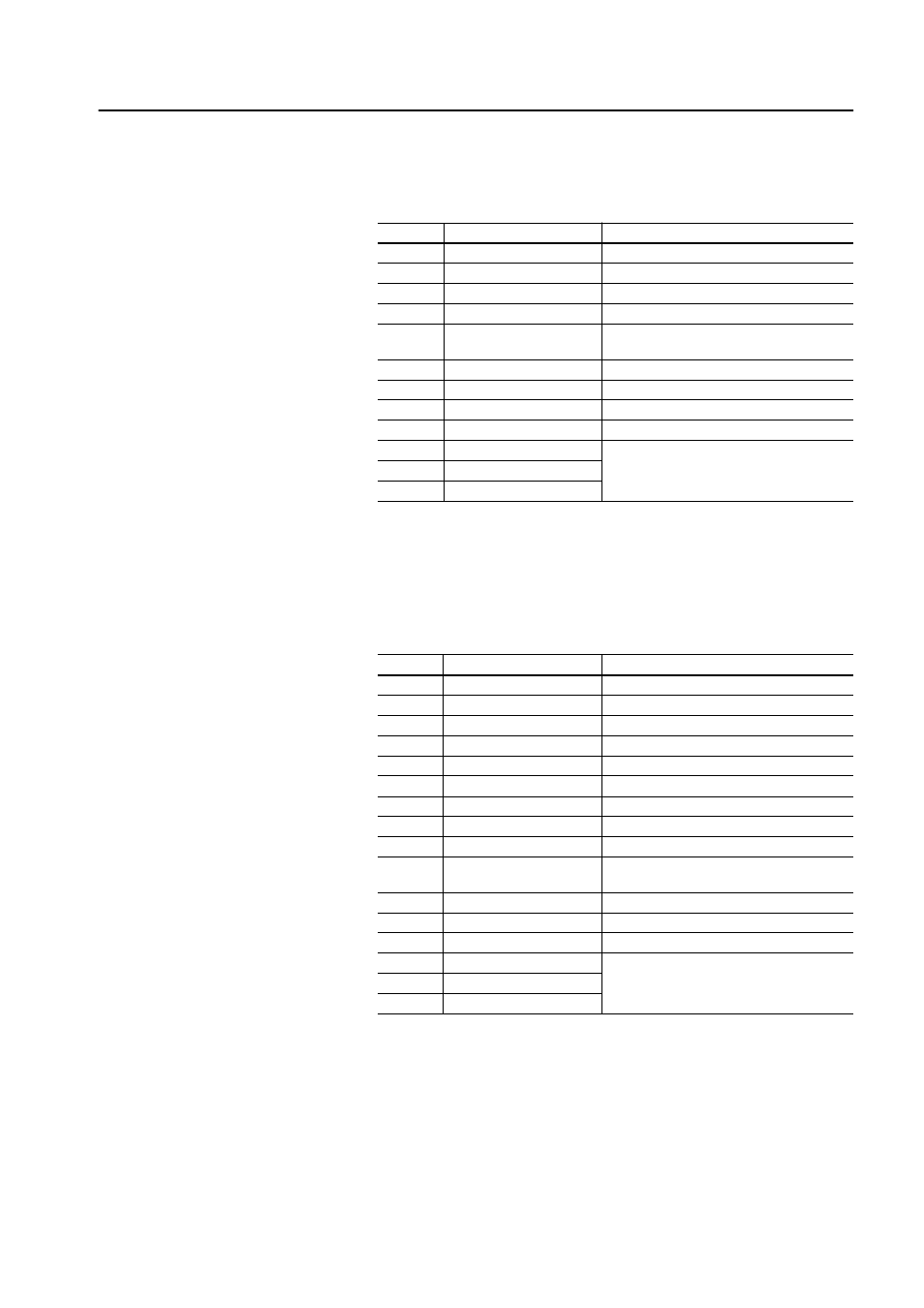
Control and Status word bits are defined as follows (speed control):
Table 5.C
Control Word (Bit definition)
To start the drive, set the control word (Low Byte) from 6 to 5Fh.
To stop the drive, set the control word (Low Byte) to 57h.
To control the drive via Terminal Block (TB3), the Control Word Low
Byte must be set to 06h (state READY TO SWITCH ON).
Table 5.D
Status Word (Bit definition)
* Internal speed reference/feedback is computed in 0.1Hz increments.
Due to rounding issues speeds in RPM may differ.
Resolution error in RPM = P66 * 0.05.
Example: for P66 = 16.6 the possible error is 1 RPM.
Bit No.
PROFIDRIVE (Control)
Function
0
On / Off 1
1 = Enable op., 0 = Stop drive according to P34
1
Operating condition / Off 2
1 = Enable operation according to P34
2
Operating condition / Off 3
1 = Enable operation, 0 = Fast Stop
3
Enable / Inhibit operation
1 = Run / Start operation,
4
Operating Condition /
Inhibit ramp
1 = Enable,
0 = Ramp to zero
5
Reserved
6
Enable / Inhibit Setpoint
1 = Speed Ref Enable
7
Acknowledge
Fault Reset at 0 to 1 transition
8 to 12
Reserved
13
Parameter Operation 0
14
Parameter Operation 1
Parameter access according to Table 5.E
15
Parameter Operation 2
Bit No.
PROFIDRIVE (Status)
Function
0
Ready / Not for switch on
1 = Ready (Diagnostics o.k.)
1
Ready / Not for operation
1 = Ready (Diagnostics o.k.)
2
Operation enabled / inhibited
1 = Drive operating (Bit 3 of Control Word)
3
Fault / no Fault
1 = Faulted
4
No Off 2 / Off 2
1 = Enabled (Bit 1 of Control Word)
5
No Off 3 / Off 3
1 = Enabled (Bit 2 of Control Word)
6
Switch On Inhibit / not inhibit
1 = Inhibited (Bit 1,2 of Control Word not set)
7
Reserved
8
Ref. Within Limits / not
1 = Speed Reference within range (P32, P33)
9
Control requested /
operation on site
1 = Master is requested to take control
10
Ref. reached
1 = Speed Reference reached
11
Direction
1 = Reverse, 0 = Forward
12
Reverse Request
1 = Reverse Request at TB input
13
Parameter Operation 0
14
Parameter Operation 1
Parameter access according to Table 5.E
15
Parameter Operation 2