19 monitfollowerror, 20 motionbusin – Lenze E94AxHE Technology Application Synchronism User Manual
Page 69
EDS94TA10040xxxx EN 1.1 - 10/2008
L
69
9400 Technology applications | Synchronism with mark synchronisation
Parameter setting & configuration
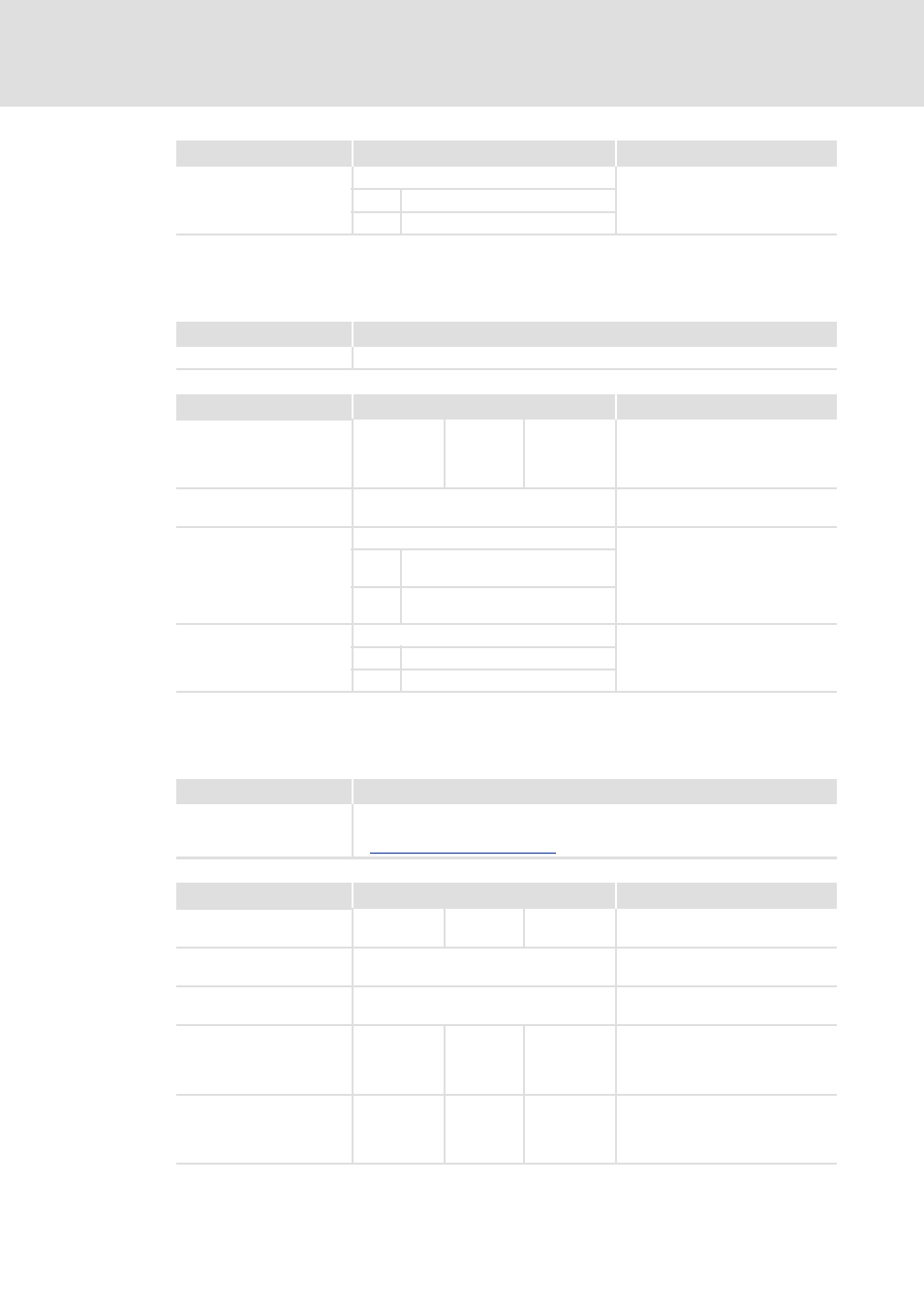
Parameterisable function blocks
4.14.19
MonitFollowError
4.14.20
MotionBusIn
C03874
Set position reached
• Display of output signal
bInTarget.
0 Set position not yet reached.
1 Set position reached.
Parameter
Possible settings
Information
Is an instance of
Function
L_LdMonitFollowError
Following error monitoring
Parameter
Possible settings
Information
C03960
-214748.3647
unit
214748.3647 Following error at the input
• Display of input signal
dnFollowErrorIn_p in real unit of
the machine.
C03961
String of digits
Position unit
• Read only
C03963
Following error out of tolerance
• Read only
FALSE Following error smaller than set
switching threshold
TRUE Following error larger than set
switching threshold
C03964
Following error monitoring activated
• Read only
FALSE Deactivated
TRUE Activated
Is an instance of
Function
L_LdExtrapolate
Optional extrapolation of the position information received via a bus system in
order to compensate for larger bus transmission cycles.
Master value source: Bus system (C 31)
Parameter
Possible settings
Information
C03550
1
127 Number of extrapolation cycles
• Initialisation: 1
C03551/1
String of digits
Position unit
• Read only
C03551/2
String of digits
Speed unit
• Read only
C03557
-214748.3647
unit/t
214748.3647 Speed at the output
• Read only
• Is generated from the speed
signal dnSpeedOut_s.
C03558
-214748.3647
unit
214748.3647 Position at the output
• Display of the dnPosOut_p output
signal in the real unit of the
machine.