10 followerrorhysteresis, 11 followerrorlimit, 12 homingsetposition – Lenze E94AxHE Technology Application Synchronism User Manual
Page 61
EDS94TA10040xxxx EN 1.1 - 10/2008
L
61
9400 Technology applications | Synchronism with mark synchronisation
Parameter setting & configuration
Parameterisable function blocks
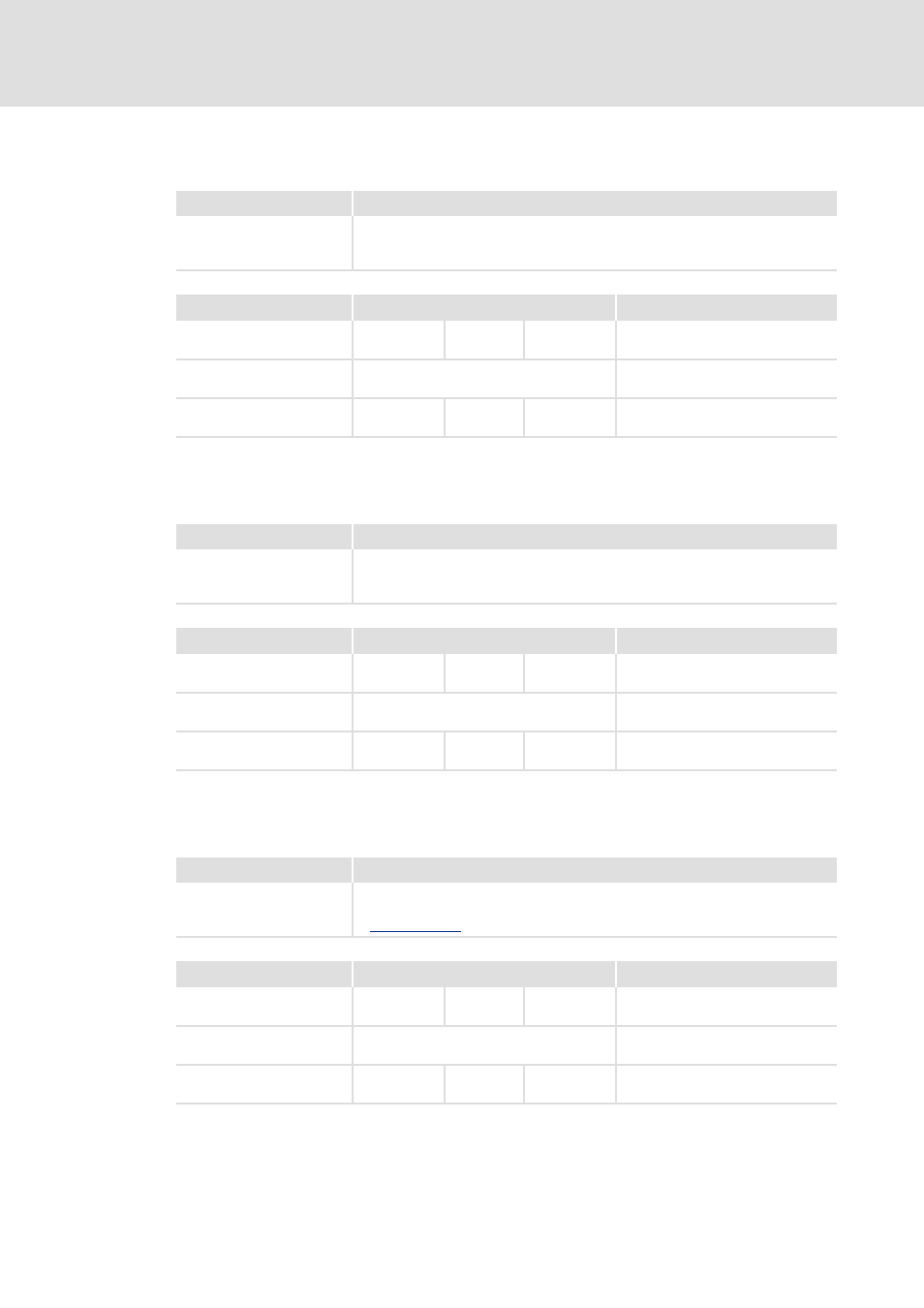
4.14.10
FollowErrorHysteresis
4.14.11
FollowErrorLimit
4.14.12
HomingSetPosition
Is an instance of
Function
L_SdSetPosition
Following error monitoring:
Conversion of the following error hysteresis selected in the real units of the machine
via C03916 into a position in [increments].
Parameter
Possible settings
Information
C03916
-214000.0000
unit
214000.0000 Position value
• Initialisation: 0.0000 unit
C03917
String of digits
Position unit
• Read only
C03918
-2147483647
2147483647 Status
• Read only
Is an instance of
Function
L_SdSetPosition
Following error monitoring:
Conversion of the following error limit select in the real units of the machine via
C03911 into a position in [increments].
Parameter
Possible settings
Information
C03911
-214000.0000
unit
214000.0000 Position value
• Initialisation: 10.0000 unit
C03912
String of digits
Position unit
• Read only
C03913
-2147483647
2147483647 Status
• Read only
Is an instance of
Function
L_SdSetPosition
Conversion of the home position selected in the real units of the machine via C03012
into a position in [increments].
Parameter
Possible settings
Information
C03012
-214000.0000
unit
214000.0000 Position value
• Initialisation: 0.0000 unit
C03013
String of digits
Position unit
• Read only
C03014
-2147483647
2147483647 Status
• Read only