5 touch probe positioning, Touch probe positioning – Lenze E94AxHE Technology Application Positioning sequence control User Manual
Page 51
EDS94TA10060xxxx EN 1.2 - 03/2010
L
51
9400 Technology applications | Positioning sequence control
Parameter setting & configuration
Profile data management
5.4.5
Touch probe positioning
In the touch probe positioning mode, the profile is first executed according to the
set. If a touch probe is detected during the process, it is automatically changed
to the profile specified in the profile parameter "Sequence profile with TP".
Here the current actual position is stored at the time of the touch probe activation (by
a touch probe sensor).
In the following relative positioning process, the "residual path" to this stored position
is travelled according to the increments.
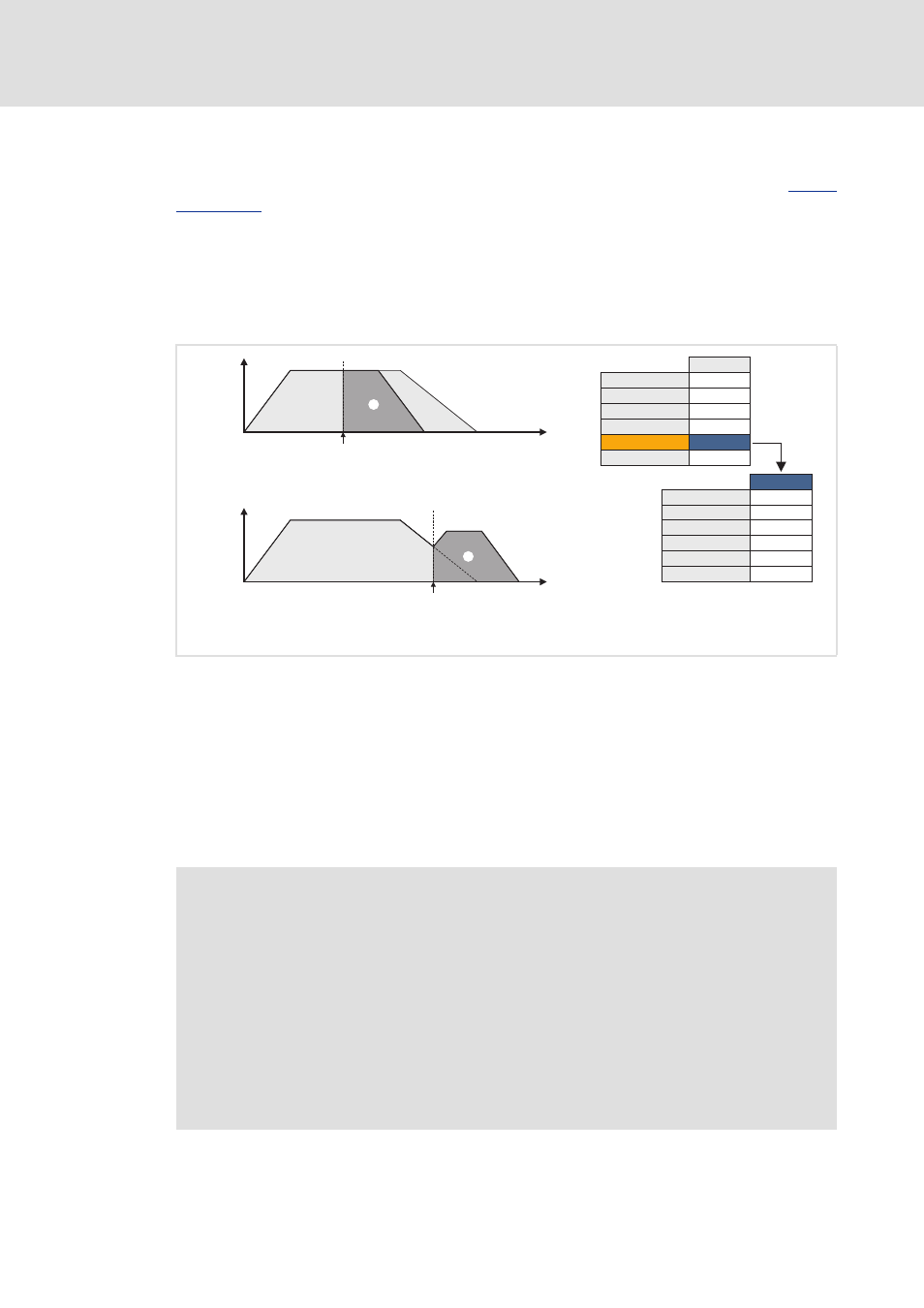
[5-9]
Examples for a "residual path positioning" after a touch probe is detected
The profile parameters "TP window start" and "TP window end" the range in which
touch probes are to be detected can be restricted.
– If both profile parameters are "0", touch probe detection will be active over the whole
profile/the whole traversing range.
If no touch probe is detected and after the profile is executed, the positioning is
continued with the profile defined in the profile parameter "Sequence profile without
TP" (profile chaining).
n
"Starting profile"
o
"Residual path profile" that is defined in the profile parameter "Sequence profile with TP" of the starting profile.
v [m/s]
t [s]
Touch probe
t [s]
Touch probe
v [m/s]
Position
Speed
Mode
Profile 4
...
Next TP profile
Next profile
7
Position
Speed
Mode
Profile 7
...
Next TP profile
Next profile
Profile 4
Profile 7
Profile 4
Profile 7
Note!
If a profile is travelled with high speed and a touch probe positioning is started
the residual path of which is shorter than the result from current speed and set
deceleration ramp, the target position is "overtravelled".
• Normally a reversing movement occurs, i.e. the drive returns.
• If, for instance, a CCW rotation of the drive is forbidden by the safety module,
the target cannot be approached since in this case the reversing movement is
not permissible.
Further constellations are possible in connection with profile chaining in which
an approach of the target position is impossible.