Lenze MC1000 Series User Manual
Page 54
50
13435742_EDBM101_v24
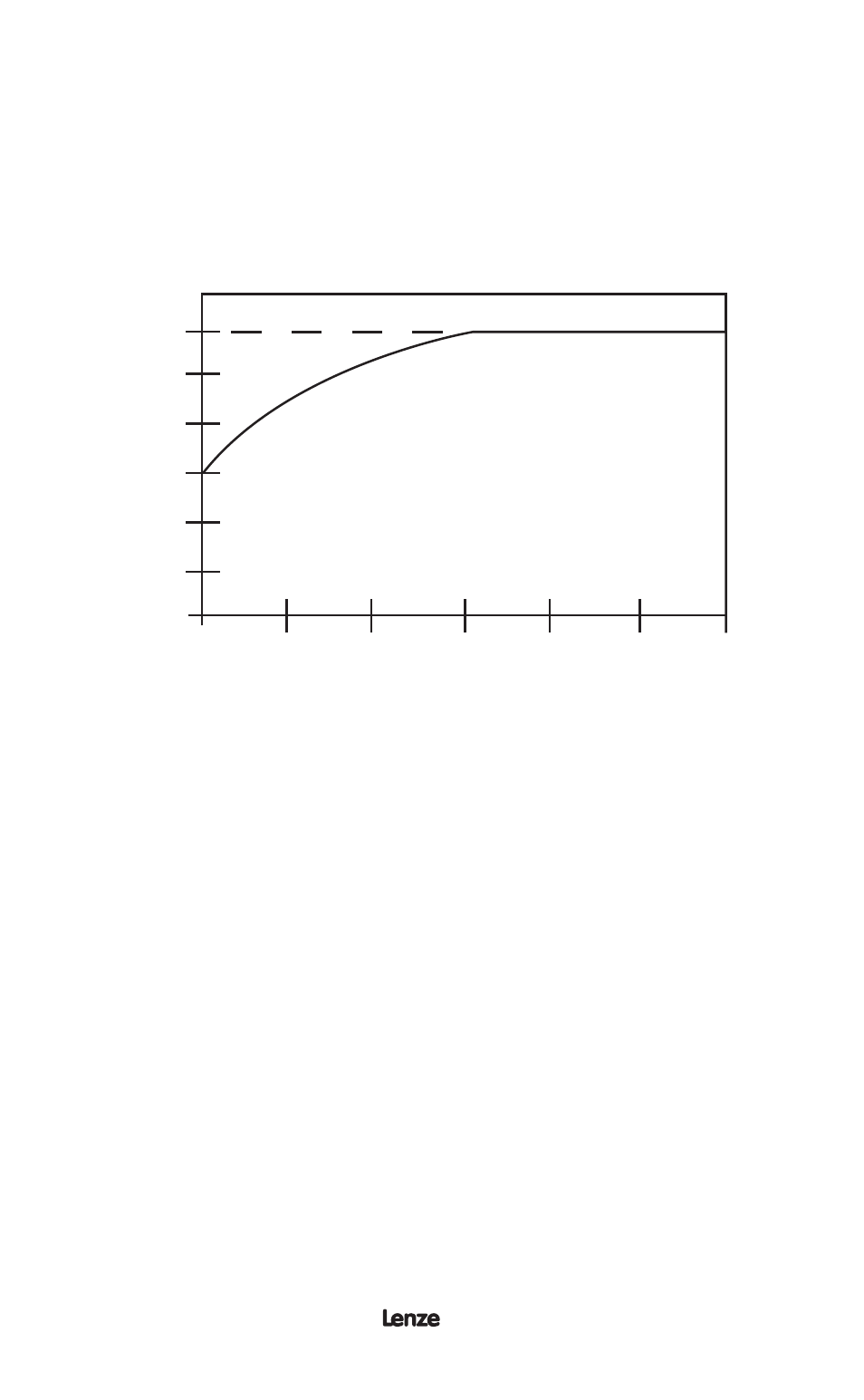
Example 2: A 480 Vac, 20 HP drive is operating a motor at 10 Hz. From the
diagram, a drive operating at 10 Hz can deliver about 75% of its output current
rating continuously. A 480 Vac, 20 HP drive’s output current rating is 27 Amps.
Therefore, the drive would be able to operate continuously at 20 Amps. The drive
would also be able to deliver 150% of that value (30 Amps) for one minute before
tripping into an OVERLOAD fault.
The “speed compensated” thermal overload is the factory default and should be
used in applications where the motor does not normally experience high loads at
low speeds for extended periods of time.
FREQUENCY (Hz)
M
AXIMUM C
ONTINUOUS
OUTPUT CURRENT (%)
NON-COMPENSATED
SPEED C
OMPENSA
TED
10
20
30
40
50
60
20
40
60
80
100
NOTE 1: The above diagram is based on a MOTOR OL setting of 100%. For lower
MOTOR OL settings, reduce the % CURRENT values by the same percentage. For
example, if MOTOR OL is set to 75%, reduce the % CURRENT values by 25%.
Therefore, the curve shifts down, but the shape of the curve remains the same.
The “non-compensated” thermal overload circuit allows 100% current continuously,
and 150% current for one minute, at all speeds. In the example above, the motor
operating at 10 Hz without “speed-compensated” protection would be allowed
to operate continuously at 27 Amps, and could draw 40.5 Amps for one minute
before tripping. Without sufficient motor cooling, this can result in motor failure due
to overheating.
The “non-compensated” circuit is selected by setting Parameter 22 - TORQUE to
CT/NOCMP. The “non-compensated” setting should only be used in applications
where the motor is properly cooled at all speeds, or the motor manufacturer has
approved the motor for full-load operation at low speeds.
NOTE 2: The operation of the motor thermal overload circuit is affected by the setting
of Parameter 34 - LOAD MLT.