10 tuning the position loop, 1 manually tuning the position loop – ElmoMC SimplIQ Servo Drives Composer User Manual User Manual
Page 35
2.10 Tuning the Position Loop
According to your drive type, you will now need to tune either the position loop or the
dual — position/velocity — loop. Tuning of the dual loop is described in
section
The procedure is very similar for both loops. The Wizard performs the test using point-
to-point (PTP) motions, according to the selected PTP motion and recording parameters.
The Composer records the PTP performance and compares it to the PTP trajectory.
The Composer Wizard enables you to perform position loop tuning in three modes:
Manual tuning
, in which you manually configure the position loop by entering each of
the required parameters.
Automatic tuning
, in which you select the level of fine tuning, and let the Composer
determine the needed parameters automatically.
Advanced manual
tuning
, in which you create or modify a gain schedule table that
operates for a range of velocities.
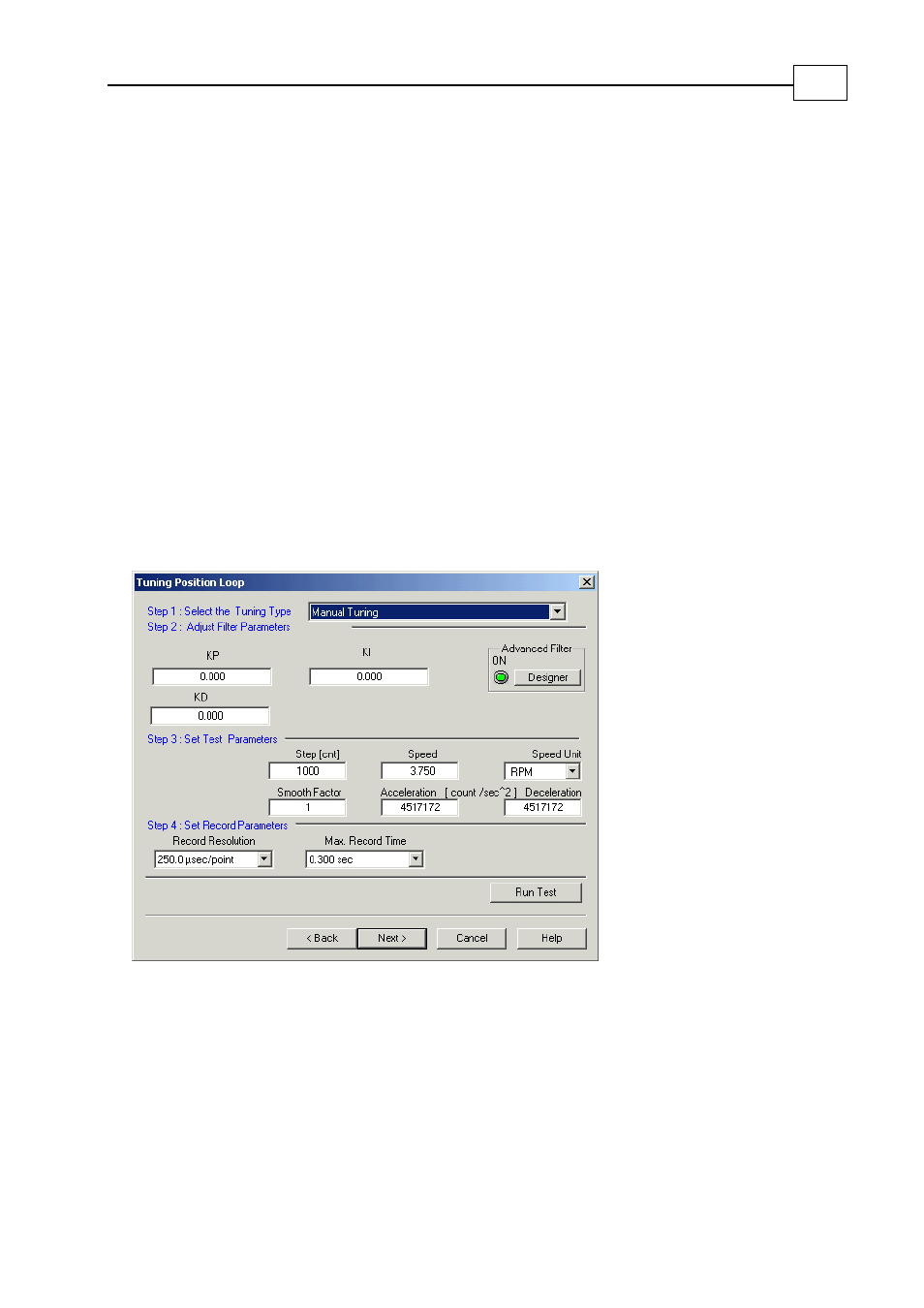
When you select Step 4, Tuning Position Loop in the Establishing Commutation dialog
box or when you finish the Tuning Velocity Loop process, the Tuning Position Loop
dialog box is displayed as follows:
Select the tuning mode from the Step 1: Select Tuning Type drop down list.
2.10.1 Manually Tuning the Position Loop
1. From the Step 1: Select the Tuning Type drop-down list, select Manual Tuning. The
dialog box will remain with its default settings.
2. In the Step 2: Adjust Filter Parameters block, type the filter values required for
optimal step response in the KP (proportional gain), KI (integral gain) and KD
(derivative gain) text boxes.
Composer User Manual
Using the Wizard
MAN-COMPUM (Ver. 1.9)
2-27