P, pd, pi and pid controllers, B.4.3, B.4.3 p, pd, pi and pid controllers – ElmoMC SimplIQ Digital Servo Drives-Bell Getting Started User Manual
Page 92
The SimplIQ for Steppers Getting Started & Tuning and Commissioning Guide
MAN-BELGS (Ver. 1.1)
92
Phase margin – We will say that the phase margin of the transfer function
)
(
s
L
is
ο
ϕ
(degree units), if
ο
ϕ
is the smallest positive value such that at any
frequency,
PM
ω
, for which
(
)
1
=
ω
PM
j
L
, the phase of
(
)
PM
j
L
ω
is
ο
ϕ
+
−180
.
The third design criterion is the system’s bandwidth. The bandwidth is a figure
of merit for the performance of the closed loop system during operation. Several
definitions of the term bandwidth appear in the literature. The bandwidth
definition we use here is the following:
The bandwidth of
)
(
s
L
is
B
ω
rad/sec, if it is the lowest frequency such that
1
)
(
=
B
j
L
ω
.
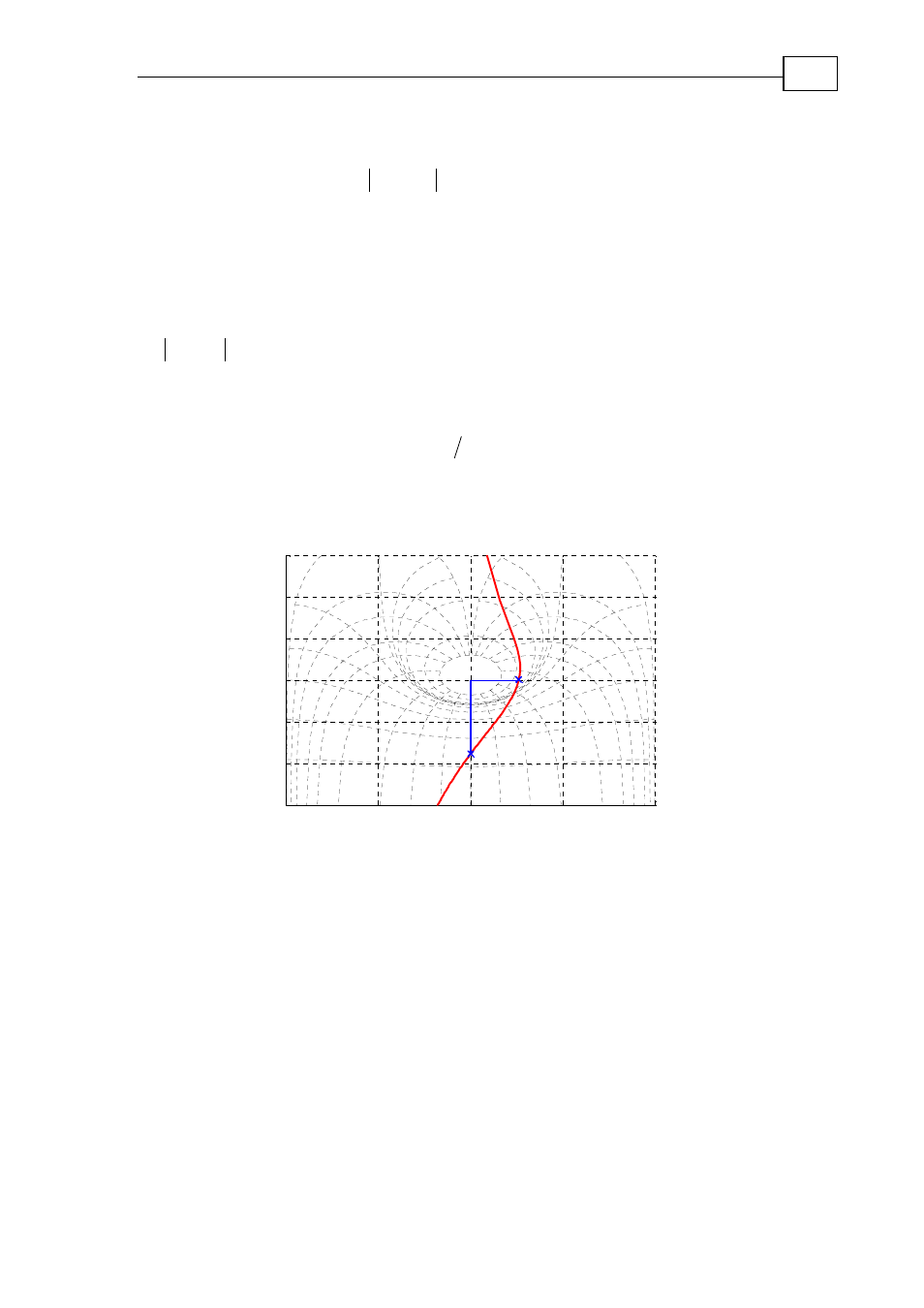
Figure 85 is a pictorial description of gain and phase margins and bandwidth for
the open loop transfer function built from:
1. A motor whose transfer function is
2
s
k
;
2. A controller transfer function
)
/(
)
(
b
s
a
s
+
+
;
3. An accurate, static sensor (sensor transfer function =
1
).
-360
-270
-180
-90
0
-30
-20
-10
0
10
20
30
O
p
e
n
-L
o
o
p
G
a
in
(d
B
)
Open-Loop Phase (deg)
Nichols Chart
6 dB
3 dB
1 dB
0.5 dB
0.25 dB
0 dB
-1 dB
-3 dB
-6 dB
-12 dB
-20 dB
φ
M
L(j
ω)
ω
B
,
ω
PM
ω
GM
Figure 85: Definition of gain margin
M
, phase margin
φ
and bandwidth frequency
B
ω
of
the open loop
( )
s
L
B.4.3 P, PD, PI and PID Controllers
A P type controller is a simple gain controller, that is,
P
K
s
C
=
)
(
. P type
controllers cannot stabilize a positioning motion system. It is, therefore, limited
to systems that are not relevant and will not be discussed further. A PD controller
includes a simple gain and a derivative,
s
K
K
)
s
(
C
D
P
⋅
+
=
. It means that the
signals used to drive the system are, except for the command input, the plant
output and its derivative. For example, the input,
u
, to a motor with command
angle,
θ
, and measured output angle,
M
θ
, will be
(
)
(
)
M
D
M
P
K
K
u
θ
θ
θ
θ
&
&−
⋅
+
−
⋅
=
(17)