Manual tuning of gain scheduling, Manual gain scheduling, A.10 – ElmoMC SimplIQ Digital Servo Drives-Bell Getting Started User Manual
Page 79: A.10.1 manual gain scheduling
The SimplIQ for Steppers Getting Started & Tuning and Commissioning Guide
MAN-BELGS (Ver. 1.1)
79
0
0.02
0.04
0.06
0.08
0.1
0
500
1000
1500
2000
2500
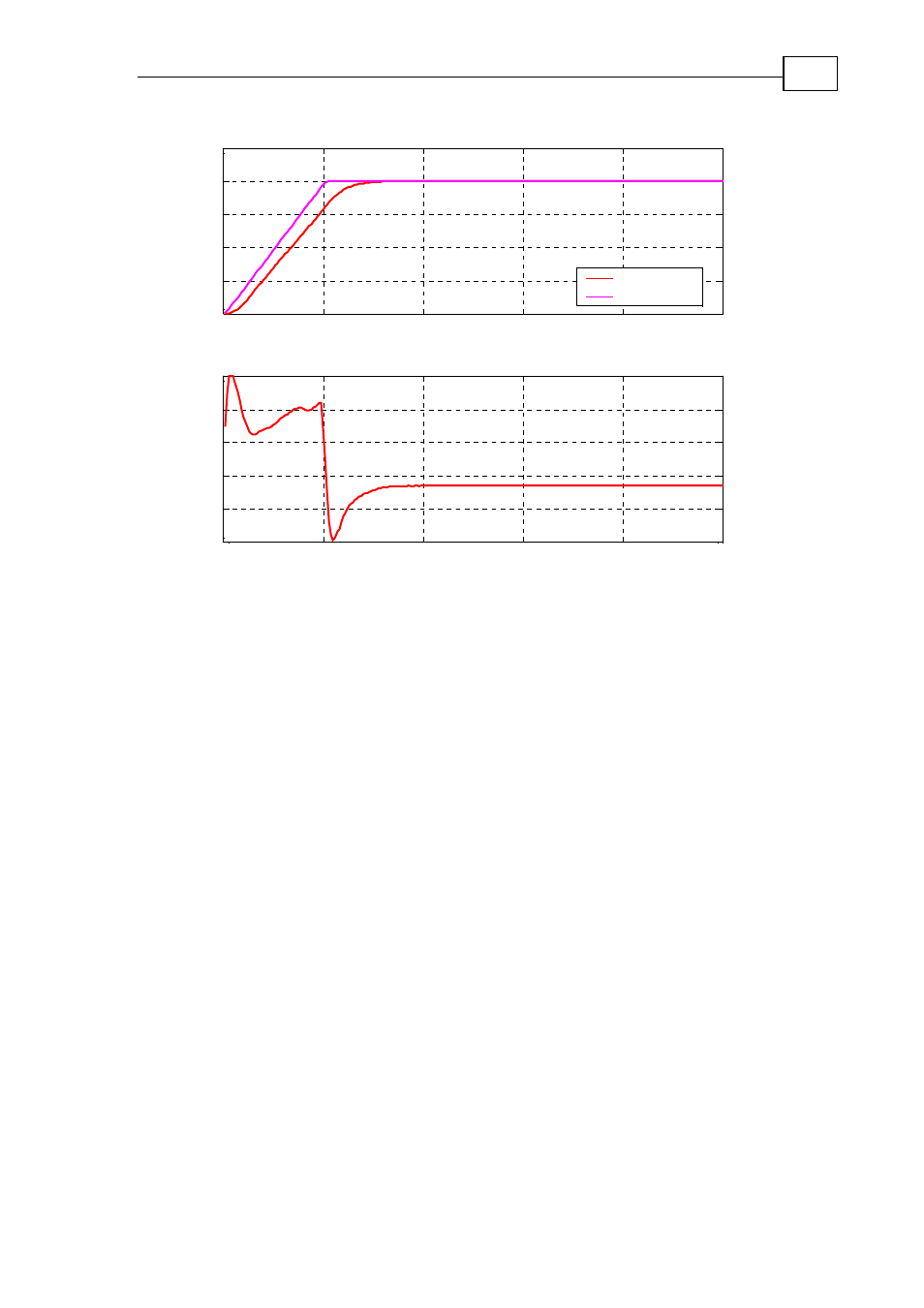
Tim e (sec.)
C
ount
s
Speed
Reference
0
0.02
0.04
0.06
0.08
0.1
-2
-0.8
0.4
1.6
2.8
4
Am
p
e
re
Tim e (sec.)
Figure 72: Tests of position design
3. The third step is to iterate on the KI parameter of the inner loop and on the
outer loop KP parameter. The iteration range for the KI of the inner loop should
not exceed 50% of its original value, and the iteration on the outer loop should
not exceed 100% of its original value.
A.10 Manual Tuning of Gain Scheduling
The previous sections dealt with the manual tuning of a fixed controller. In this
section we extend our ability to tune a gain-scheduled controller.
Controller gains can be scheduled either manually or by reference to the speed
controller.
A.10.1 Manual Gain Scheduling
Manual gain scheduling is useful when one can learn of the changing conditions:
Using position data - for example in a winder application.
Using external data, by analog input or communication. For example, a winder
may learn the wheel weight by feeding the output of a load-cell to the analog
input, or a robot arm driver may receive a gain-scheduling command from a
central controller, that is aware of the entire robot posture.