The example system, A.6 the, Example – ElmoMC SimplIQ Digital Servo Drives-Bell Getting Started User Manual
Page 65: System, A.6 the example system
The SimplIQ for Steppers Getting Started & Tuning and Commissioning Guide
MAN-BELGS (Ver. 1.1)
65
0
0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
0
2000
4000
6000
8000
10000
12000
14000
16000
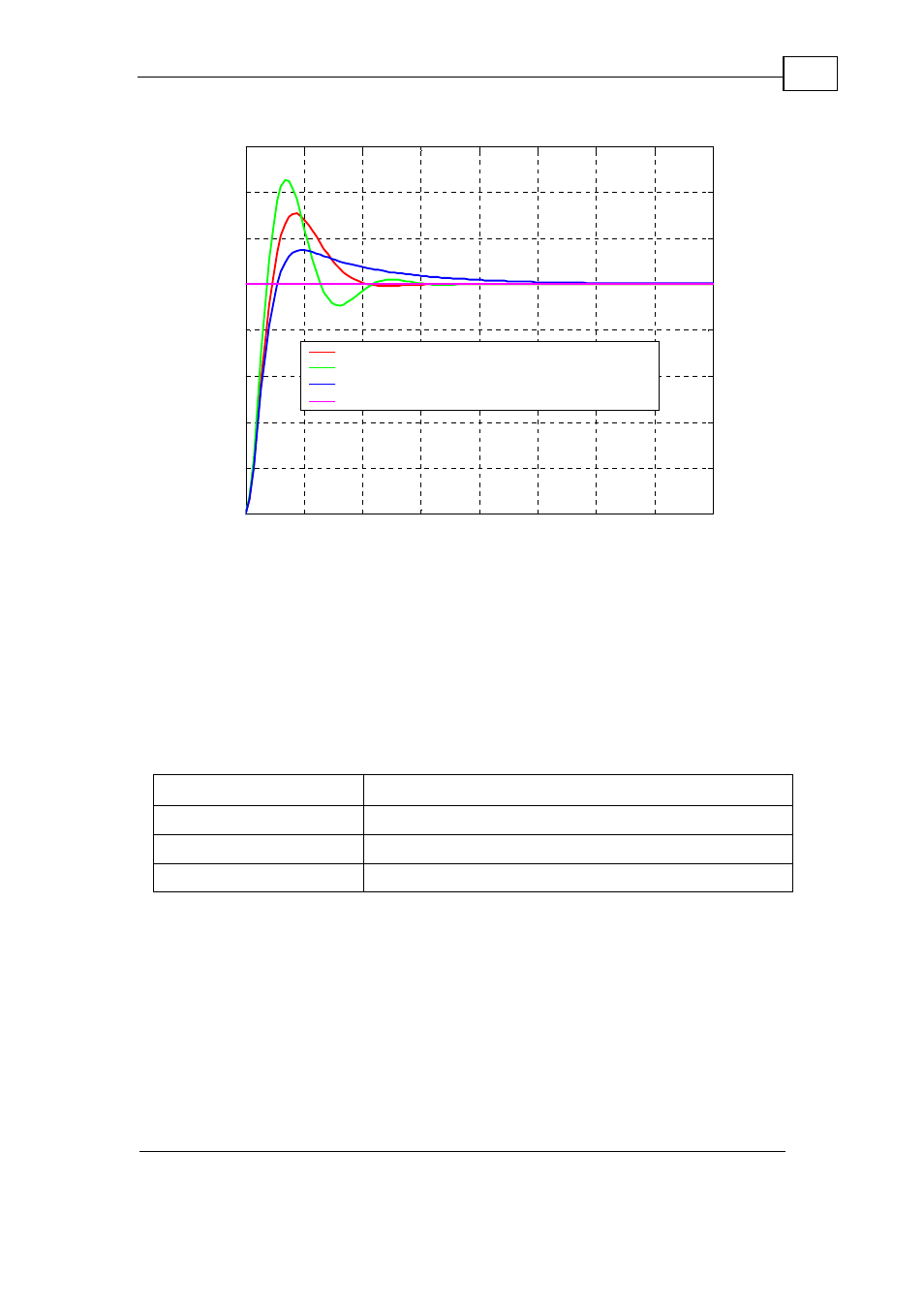
Tim e (sec.)
S
tep
re
s
p
on
s
e
A cceptable margins: Nice response
Too low margins: large overshoot and oscillations
Too much margins: long settling time
Reference
Figure 58: Comparison between step responses of acceptable controllers and non-
acceptable controllers. Details on the plot.
A.6 The Example System
Manual tuning is not a true science with closed formulas. It is heuristic, and the
heuristics fit only a (relatively wide) selection of systems. All the explanations in
the rest of this Appendix refer to the two laboratory systems, shown below.
Both the systems have the same motor and amplifier:
Characteristic Value
Motor type
Brushless, three pole pairs, 4 Amp continuous.
Encoder resolution
4000 counts/rev (1000 lines)
Amplifier Bell
5/100
In system #1, the motor is loaded by a simple inertia. This simple inertia load
enables high bandwidth control. In system #2, the load inertia is coupled to the
motor through flexible coupling. The coupling introduces a mechanical
resonance.
loop gain is 0 db. For further explanation, see the Auto-tuning manual, or any basic textbook in control
theory.
Acceptable margins: good response
Margins too low: large overshoot and oscillations
Margins too high: long settling time
Reference