ElmoMC SimplIQ Digital Servo Drives-Bell Getting Started User Manual
Page 78
The SimplIQ for Steppers Getting Started & Tuning and Commissioning Guide
MAN-BELGS (Ver. 1.1)
78
A.9 Executing Manual Tuning for a Cascaded
Position Controller
Design of a position controller is a two-stage sequence. The first is to tune a
speed controller and the second is to tune the simple gain outer controller.
Assume the speed controller was designed and tested as shown in Figure 62 for
which KI=8000, KP=30. The rise time is dT=0.0034 seconds. The suggested dual
loop controller is:
1. Inner loop parameters:
KI is half that of the speed loop designed in the first
stage and KP remains the same.
2. Outer loop parameters are: KP=0.5/dT=16.
Explanation:
(a) The KP of the outer loop will decrease the phase margin. The KI of the inner
loop was designed to achieve the minimal phase margin allowed. It is therefore
required to increase the phase margin of the inner loop by decreasing KI in order
to leave some extra phase margin for KP of the outer loop.
(b) The outer loop formula for KP is based on the estimate of the system’s
bandwidth.
(c) KP of the inner loop mainly dictates the gain margin; as such it remains
unchanged.
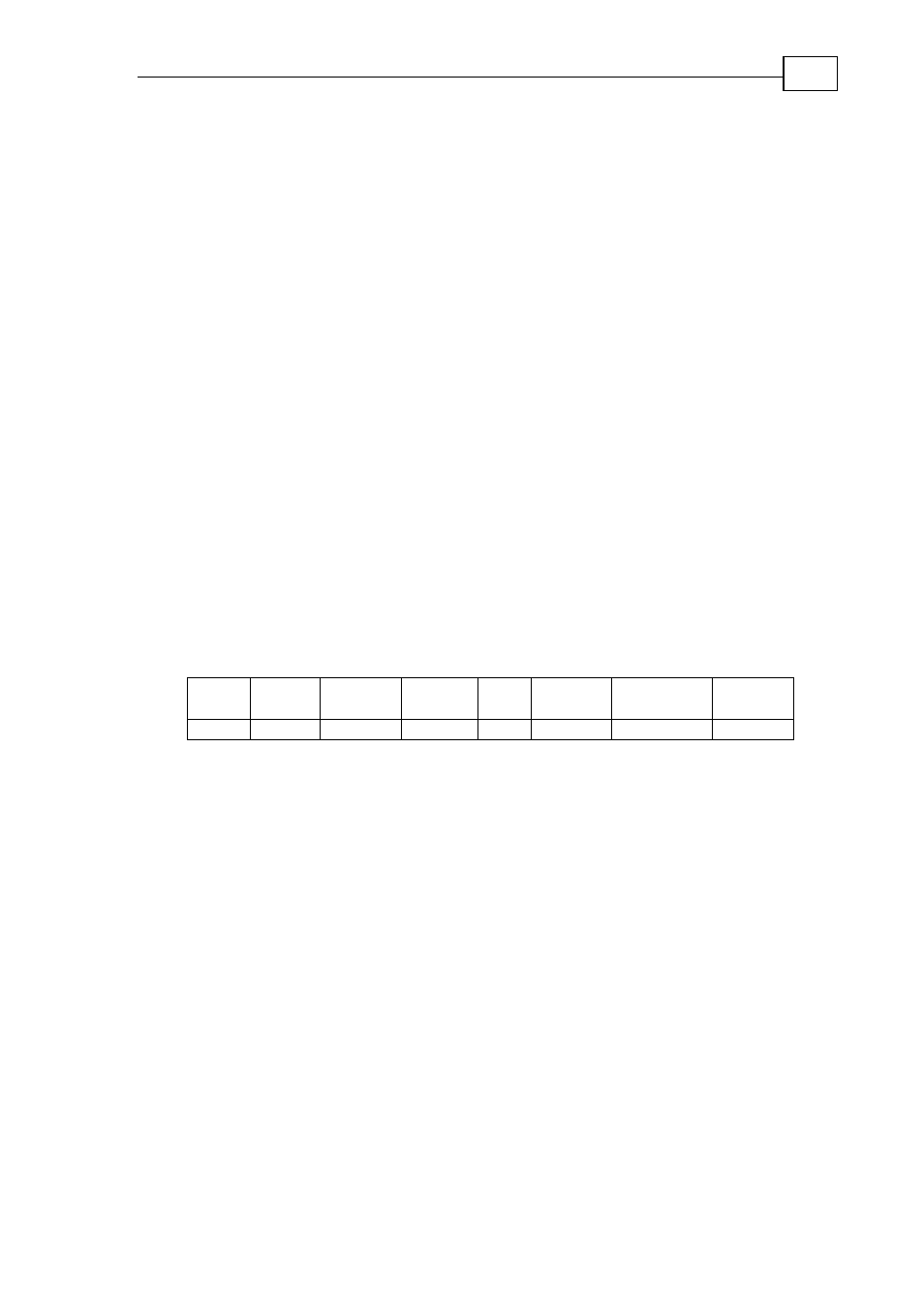
The tested results are shown in Figure 72 for the parameters in the table below.
KP KI KP
-
outer
Velocity Step Rec. T.
Rec. Res
Acc/Dec
30
4000
150
100000
2000 0.48 sec
400 musec
60 M