3 specifying the setpoint – NORD Drivesystems BU0210 User Manual
Page 23
3 Function description
BU 0210 GB
Subject to technical amendments
23
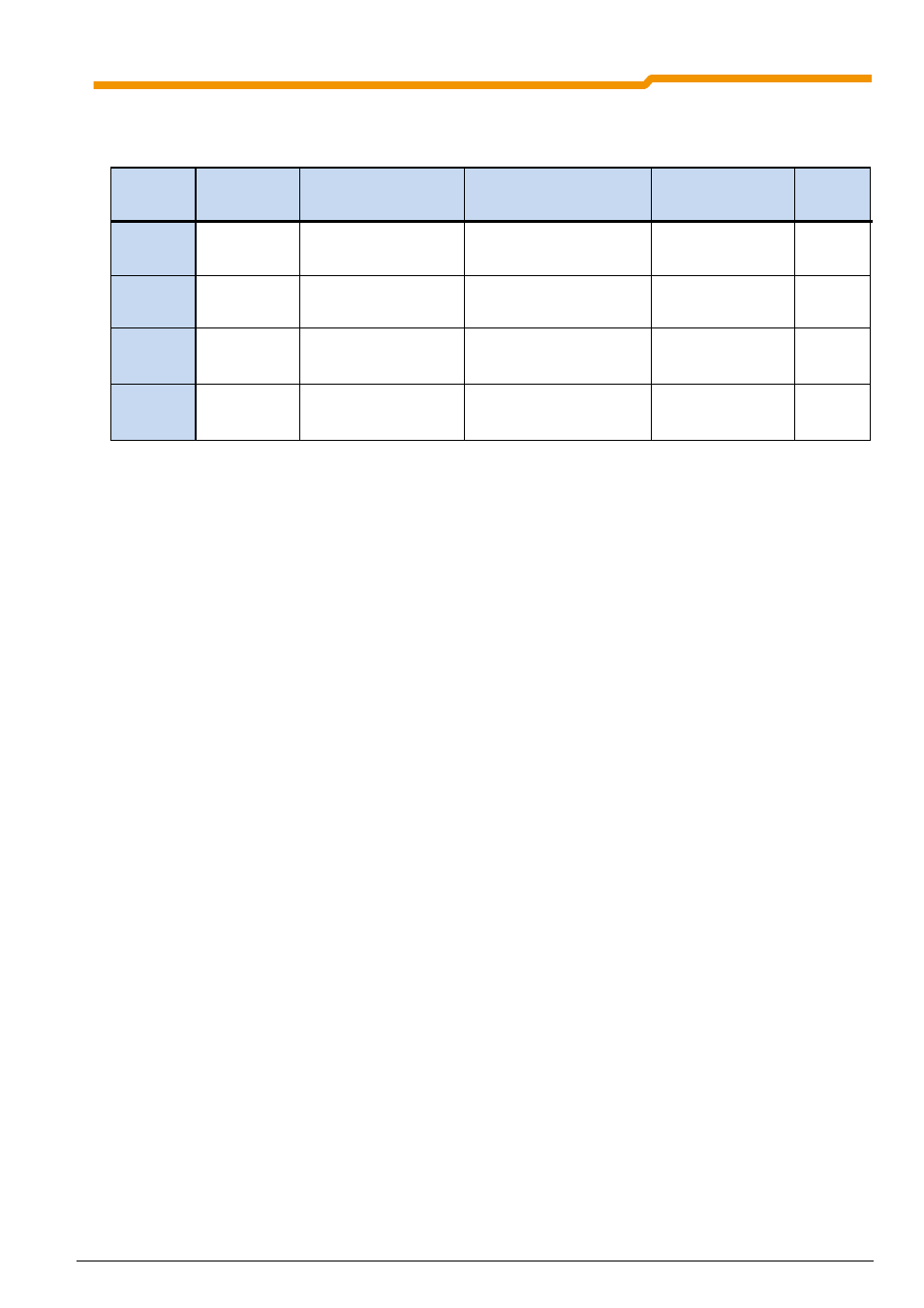
Overview of incremental and absolute encoder parameter settings
Number of
rotary encoder
rotations
P604 Encoder Type
P605 CANopen absolute
encoder resolution
P615 Maximum
Position
Reference
Run
Single-turn -
Absolute
Encoder
1
5 = CANopen
Optimised path
Array [01] = 0
Array [02] = Pulse number
0 No
Multi-turn -
Absolute
Encoder
≥ 1
5 = CANopen optimised
path
Array [01] = Number
Array [02] = Pulse number
0.5 * Total rotations
No
Incremental
Rotary
Encoder
1
3 = Increment, absolute
4 = Increment, absolute
with saving
-
0 Yes
Incremental
Rotary
Encoder
> 1
3 = Increment, absolute
4 = Increment, absolute
with saving
-
0.5 * Total rotations
Yes
Array [01] = Multi-turn resolution - number of possible rotary encoder rotations
Array [02] = Single-turn resolution - resolution per rotation of rotary encoder
NOTE
A multi-turn encoder can also be used as a single-turn absolute encoder. For this, the setting
of the parameter P605 "Absolute Encoder" in Array [01] for multi-turn resolution must be
parameterised to 0 (See table below under P605 for the single-turn absolute encoder)
3.3 Specifying the setpoint
Three different procedures are available for specifying the setpoint. The specification of the setpoint can be
made via:
digital inputs or Bus IO In Bits as absolute position by means of the position array
digital inputs or Bus IO In Bits as relative position by means of the position increment array
Bus setpoint value
For the specification of the setpoint value it does not matter how the actual position is obtained. Absolute,
relative and bus setpoint values can be specified, regardless of whether an absolute encoder or incremental
encoder are used for the feedback of the number of rotations.
3.3.1
Position array – absolute setpoint position via digital inputs or BUS I/O In Bits
In parameter P610 "Setpoint Mode" up to 15 positions can be selected via Function 0 = "Position Array", using
the digital inputs 1-4 of the inverter or the Bus IO In Bits. If the I/O-extension is used, there are additionally up
to 4 digital inputs, which are also interpreted as Bus IO In Bits.
The position numbers result from the binary value. A position setpoint value can be parameterised for each
position number. The position setpoint value can either be entered via a control panel (Control Technology Unit
or Parameter Technology Unit) or with a PC by means of the "NORD CON" parameterisation software (read
out and adopt current position), or via "Teach-in" by travelling to the positions.
With the setting [62] "Sync for Position Array Pointer" for the digital inputs or BUS I/O In Bits it is possible to
control the start of travel to the setpoint position. If one of the inputs or bus IO In bits is parameterised to [62]
"Sync for Position Array Pointer", by means of further digital inputs or Bus I/O In Bits, the position or the
position array can be preselected as binary code. The position value is adopted as the setpoint position as
soon as the input "Sync for Position Array Pointer" is set to "1".