A4.19 example of block connections, A4.19.1 view object for pid function block, A4.19 example of block connec- tions – Yokogawa EJA115 User Manual
Page 60
IM 01C22T02-01E
A-22
APPENDIX 4. PID Block
A4.19 Example of Block Connec-
tions
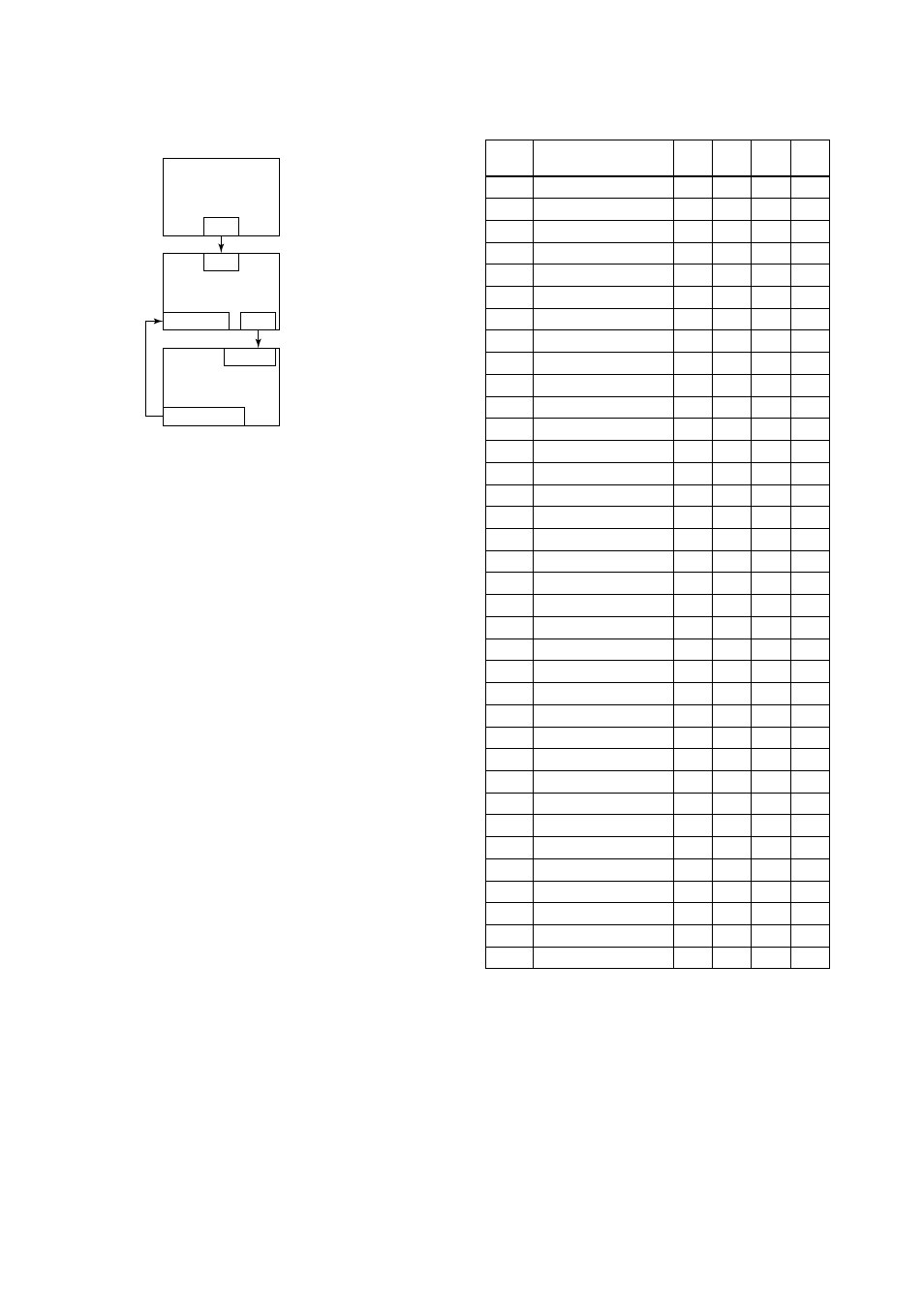
PID
BKCAL_IN
OUT
IN
AO
BKCAL_OUT
CAS_IN
AI
OUT
FA0406.EPS
When configuring a simple PID control loop by
combining an EJA transmitter with a fieldbus valve
positioner that contains an AO block, follow the
procedure below to make the settings of the corre-
sponding fieldbus function blocks:
1. Connect the AI block and PID block of the EJA,
and the AO block of the valve positioner as shown
above.
2. Set MODE_BLK.target of the PID block to O/S,
and then set GAIN, RESET, and RATE to appropri-
ate values.
3. Check that the value of MODE_BLK.actual of the
AI block is Auto.
4. Set MODE_BLK.target of the AO block to
CAS|AUTO (meaning "Cas and Auto").
5. Check that the value of BKCAL_IN.status of the
PID block is not Bad.
6. Check that the value of IN.status of the PID block is
not Bad.
7. Check that Auto is set in MODE_BLK.permitted of
the PID block.
8. Set MODE_BLK.target of the PID block to Auto.
When finishing all steps in order, the PID block and
AO block exchange the respective information and
initialize the cascade connection. Consequently, the
value of MODE_BLK.actual of the PID block changes
to Auto and automatic PID control starts.
A4.19.1 View Object for PID Function
Block
VIEW
4
Relative
Index
Parameter Mnemonic
ST_REV
TAG_DESC
STRATEGY
ALERT_KEY
MODE_BLK
BLOCK_ERR
PV
SP
OUT
PV_SCALE
OUT_SCALE
GRANT_DENY
CONTROL_OPTS
STATUS_OPTS
IN
PV_FTIME
BYPASS
CAS_IN
SP_RATE_DN
SP_RATE_UP
SP_HI_LIM
SP_LO_LIM
GAIN
RESET
BAL_TIME
RATE
BKCAL_IN
OUT_HI_LIM
OUT_LO_LIM
BKCAL_HYS
BKCAL_OUT
RCAS_IN
ROUT_IN
Subtotals
2
2
1
2
2
4
4
4
4
4
4
4
4
41
VIEW
3
2
4
2
5
5
5
5
5
5
5
5
5
53
VIEW
2
2
11
11
2
1
4
4
4
4
43
VIEW
1
2
4
2
5
5
5
5
28
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
TA0413-1.EPS