Appendix 4. pid block, A4.1 function diagram, A4.2 functions of pid bock – Yokogawa EJA115 User Manual
Page 52
IM 01C22T02-01E
A-14
APPENDIX 4. PID Block
APPENDIX 4. PID BLOCK
A PID block performs the PID control computation based on the deviation of the measured value (PV) from the
setpoint (SV), and is generally used for constant-setpoint and cascaded-setpoint control.
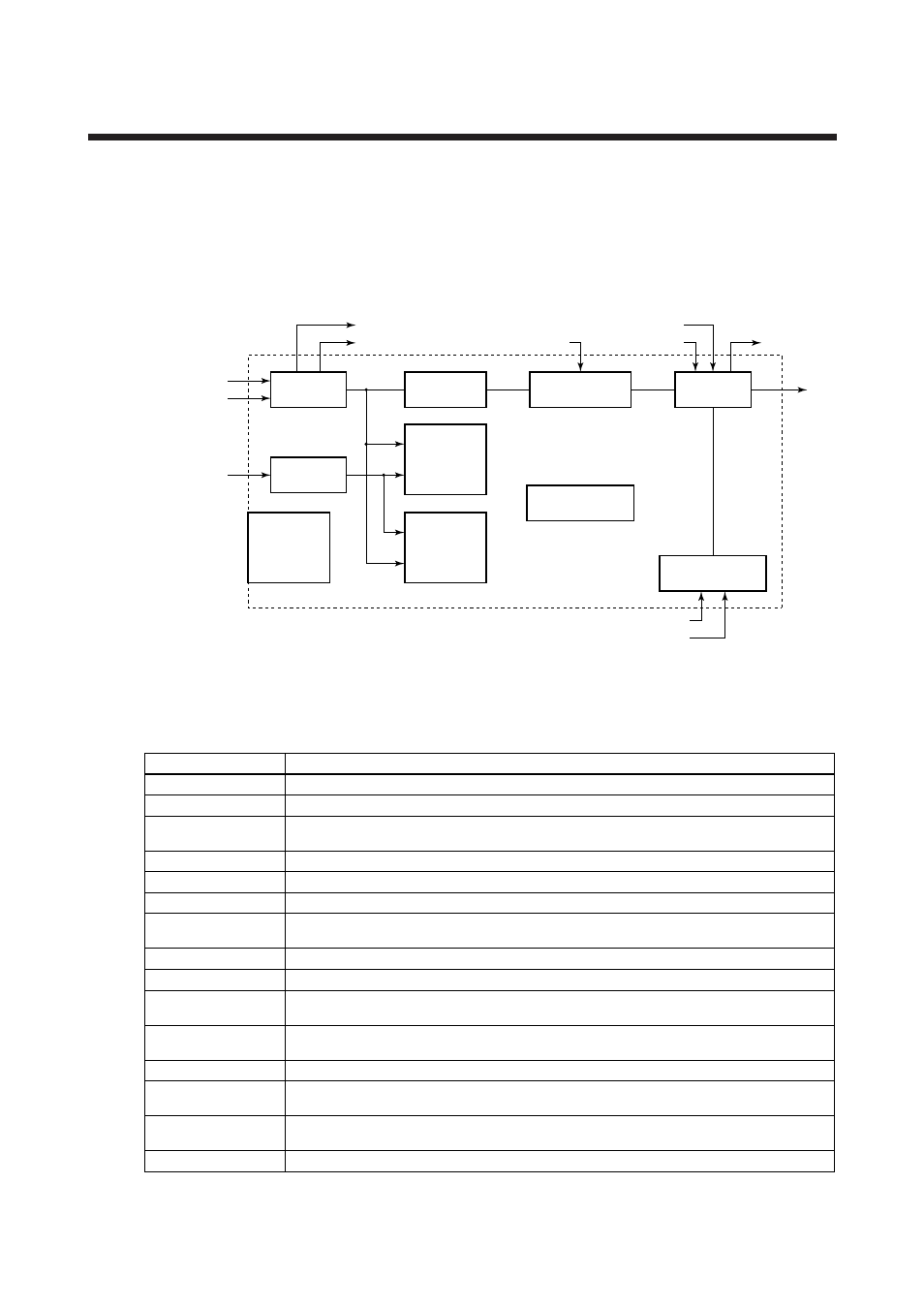
A4.1 Function Diagram
The figure below depicts the function diagram of a PID block.
Setpoint
Output
Bypass
Input Filter
PID Control
Computation
Alarm
Processing
Mode Control
Feed-forward
Data Status
Management
Output Tracking
CAS_IN
BKCAL_OUT
RCAS_OUT
BKCAL_IN
ROUT_IN
ROUT_OUT
FF_VAL
RCAS_IN
TRK_IN_D
TRK_VAL
IN
OUT
PV
SP
FA0401.EPS
A4.2 Functions of PID Bock
The table below shows the functions provided in a PID block.
PID control computation
Control output
Switching of direction of
control action
Control action bypass
Feed-forward
Measured-value tracking
Setpoint limiters
External-output tracking
Mode change
Bumpless transfer
Initialization and manual
fallback
Manual fallback
Auto fallback
Mode shedding upon
computer failure
Alarm processing
Function
Description
Computes the control output in accordance with the PID control algorithm.
Converts the change in control output
∆
MV to the manipulated value MV that is to be actually output.
Switches over the direction of control action between direct and reverse, i.e., the direction of changes in
the control output depending on the changes in the deviation.
When the bypass is on, the value of the SP is scaled to the range of the OUT and output as the OUT.
Adds the value of the FF_VAL (input to the PID block) to the output from the PID computation.
Equalizes the setpoint SP to the measured value PV.
Limit the value of setpoint SP within the preset upper and lower levels as well as limit the rate of change
when the PID block is in Auto mode.
Performs the scaling of the value of TRK_VAL to the range of the OUT and outputs it as the OUT.
Changes the block mode between 8 modes: O/S, IMan, LO, Man, Auto, Cas, RCas, ROut.
Prevents a sudden change in the control output OUT at changes in block mode and at switching of the
connection from the control output OUT to the cascaded secondary function block.
Changes the block mode to IMan and suspends the control action when the specified condition is met.
Changes the block mode to Man and aborts the control action.
Changes the block mode to Auto when it is Cas, and continues the control action with the setpoint set
by the operator.
Changes the block mode in accordance with the SHED_OPT setting upon a computer failure.
Generates block alarms and process alarms, and performs event updates.
TA0401.EPS