A4.17 mode shedding upon computer failure, A4.17.1 shed_opt, A4.18 alarms – Yokogawa EJA115 User Manual
Page 59: A4.18.1 block alarm (block_alm), A4.18.2 process alarms, A4.17 mode shedding upon com- puter failure, A-21, 2 only when auto is set as permitted mode
IM 01C22T02-01E
A-21
APPENDIX 4. PID Block
A4.17 Mode Shedding upon Com-
puter Failure
When the data status of RCAS_IN or ROUT_IN,
which is the setting received from a computer as the
setpoint SP, falls to Bad while the PID block is
running in the RCas or ROut mode, the mode shedding
occurs in accordance with the settings in SHED_OPT.
If the RCAS_IN data is not renewed within the time
specified by SHED_RCAS in resource block, the data
status of RCAS_IN falls to Bad.
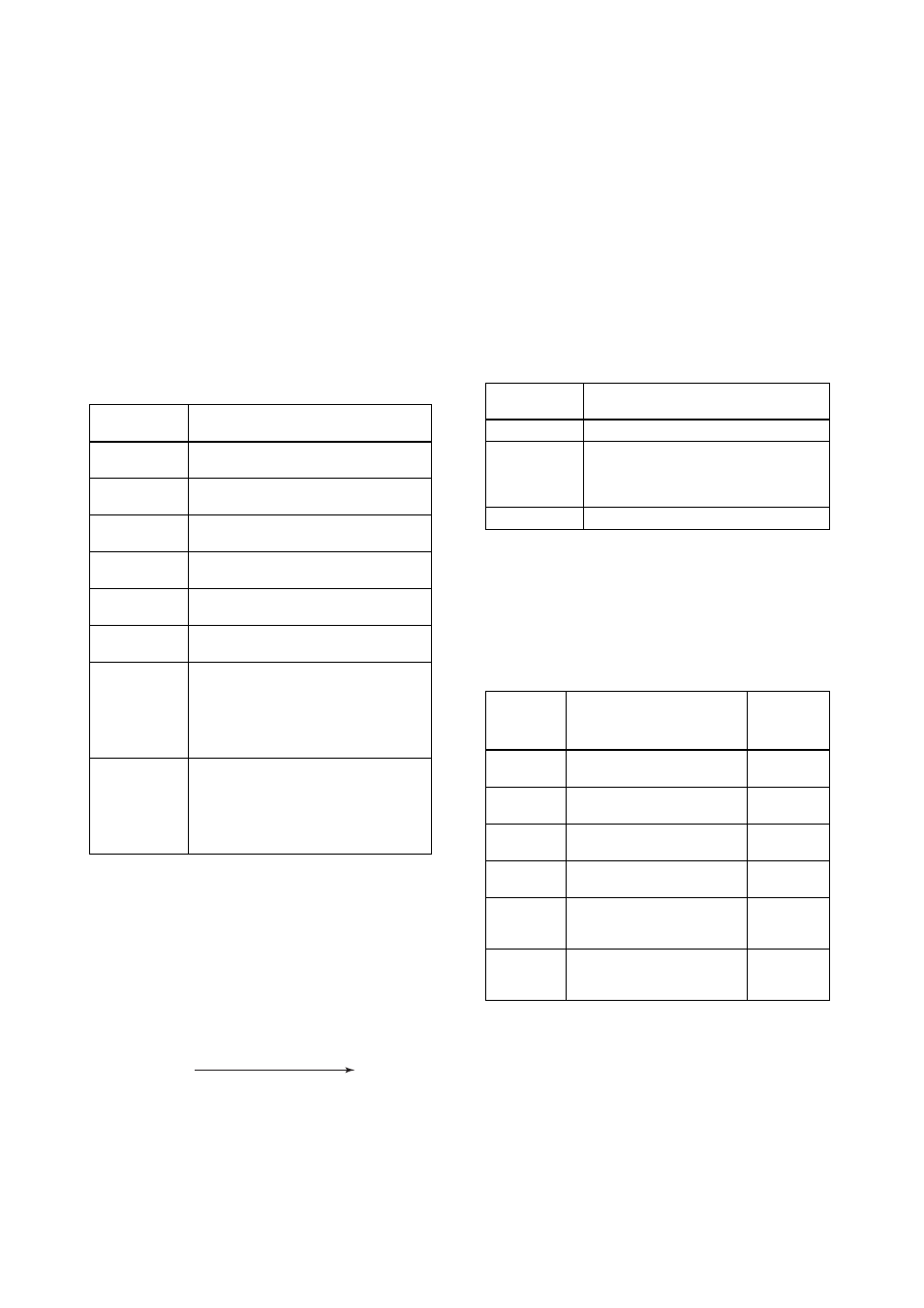
A4.17.1 SHED_OPT
The SHED_OPT setting stipulates the specifications of
mode shedding as shown below. Only one can be set.
Available Setting
for SHED_OPT
Actions upon Computer Failure
Sets MODE_BLK.actual to Cas*
1
,
and leaves MODE_BLK.target unchanged.
Sets both MODE_BLK.actual and
MODE_BLK.target to Cas*
1
.
Sets MODE_BLK.actual to Auto*
2
, and
leaves MODE_BLK.target unchanged.
Sets both MODE_BLK.actual and
MODE_BLK.target to Auto*
2
.
Sets MODE_BLK.actual to Man, and
leaves MODE_BLK.target unchanged.
Sets both MODE_BLK.actual and
MODE_BLK.target to Man.
If Cas is in MODE_BLK.target, sets
MODE_BLK.actual to Cas*
1
, and leaves
MODE_BLK.target unchanged.
If Cas is not set in MODE_BLK.target,
sets MODE_BLK.actual to Auto*
2
, and
leaves MODE_BLK.target unchanged.
If Cas is set in MODE_BLK.target, sets
both MODE_BLK.actual and
MODE_BLK.target to Cas*
1
.
If Cas is not set in MODE_BLK.target,
sets MODE_BLK.actual to Auto*
2
, and
MODE_BLK.target to Cas.
Normal shed,
normal return
Normal shed,
no return
Shed to Auto,
normal return
Shed to Auto,
no return
Shed to Manual,
normal return
Shed to Manual,
no return
Shed to retained
target, normal
return
Shed to retained
target, no return
TA0410.EPS
*1 The modes to which a PID block can transfer are
limited to those set in MODE_BLK.permitted, and
the priority levels of modes are as shown below.
In fact, if Normal shed, normal return is set for
SHED_OPT, detection of a computer failure
causes MODE_BLK.actual to change to Cas, Auto,
or MAN, whichever is set in MODE_BLK.
permitted and has the lowest priority level.
FA0405.EPS
Higher priority
level
Lower priority
level
ROut
RCas
Cas
Auto
Man
*2 Only when Auto is set as permitted mode.
NOTE: If a control block is connected as a cascade primary block of
the PID block in question, a mode transition of the PID block
to Cas occurs in the following sequence due to initialization
of the cascade connection: RCas or ROut
→
Auto
→
Cas.
A4.18 Alarms
There are two kinds of alarms generated by a PID
block: block and process alarms.
A4.18.1 Block Alarm (BLOCK_ALM)
The block alarm BLOCK_ALM is generated upon
occurrence of either of the following errors (values set
in BLOCK_ERR) and notifies the content of
BLOCK_ERR.
Value of
BLOCK_ERR
Condition
MODE_BLK actual of PID block is LO.
IN.status of the PID block is either of the
following:
•
Bad-Device Failure
•
Bad-Sensor Failure
MODE_BLK.target of the PID block is O/S.
Local Override
Input Failure
Out of Service
TA0411.EPS
A4.18.2 Process Alarms
There are six types of process alarms. Only one
process alarm can be generated at the same time, and
the process alarm having the highest priority level from
among those occurring at the same time is generated.
The priority level is set for each process alarm type.
Parameter
Containing
Priority
Level Setting
Cause of Occurrence
Process
Alarm
Occurs when the PV increases
above the HI_HI_LIM value.
Occurs when the PV increases
above HI_LIM value.
Occurs when the PV decreases
below the LO_LIM value.
Occurs when the PV decreases
below the LO_LO_LIM value.
Occurs when the value of
[PV - SP] increases above the
DV_HI_LIM value.
Occurs when the value of
[PV - SP] decreases below the
DV_LO_LIM value.
HI_HI_PRI
HI_PRI
LO_PRI
LO_LO_LIM
DV_HI_PRI
DV_LO_PRI
HI_HI_ALM
HI_ALM
LO_ALM
LO_LO_ALM
DV_HI_ALM
DV_LO_ALM
TA0412.EPS