A4.4 pid computation details, A4.4.2 pid control parameters, A4.5 control output – Yokogawa EJA115 User Manual
Page 55: A4.5.1 velocity type output action, A4.6 direction of control action, A4.7 control action bypass
IM 01C22T02-01E
A-17
APPENDIX 4. PID Block
A4.4 PID Computation Details
A4.4.1PV-proportional and -derivative
Type PID (I-PD) Control Algorithm
For PID control, the PID block in an EJA employs the
PV-proportional and PV-derivative type PID control
algorithm (referred to as the I-PD control algorithm) in
Auto and RCas mode. The I-PD control algorithm
ensures control stability against sudden changes in the
setpoint, such as when the user enters a new setpoint
value. At the same time, the I-PD algorithm ensures
excellent controllability by performing proportional,
integral, and derivative control actions in response to
changes of characteristics in the controlled process,
changes in load, and occurrences of disturbances.
In Cas mode, PV derivative type PID control algorithm
(referred to as the PI-D control algorithm) is employed
in order to obtain better performance against the
changes in the setpoint. The algorithm is automacially
switched by the block according to the mode. A basic
form of each algorithm is expressesd in the equation
below.
∆
MVn
ϭ K
∆
PVn
ϩ (PVn Ϫ SPn) ϩ
∆
(
∆
PVn)
∆
T
Ti
Td
∆
T
{
}
I-PD Control Algorithm (in Auto / RCas mode)
∆
MVn
ϭ K
∆
(PVn
Ϫ SPn) ϩ (PVn Ϫ SPn) ϩ
∆
(
∆
PVn)
∆
T
Ti
Td
∆
T
{
}
PI-D Control Algorithm (in Cas mode)
Where,
∆
MVn = change in control output
∆
PVn = change in measured (controlled) value =
PVn - PVn-1
∆
T
= control period = period_of_execution in
Block Header
K
= proportional gain = GAIN (= 100/
proportional band)
Ti
= integral time = RESET
Td
= derivative time = RATE
The subscripts, n and n-1, represent the time of
sampling such that PVn and PVn-1 denote the PV
value sampled most recently and the PV value sampled
at the preceding control period, respectively.
A4.4.2 PID Control Parameters
The table below shows the PID control parameters.
Parameter
Description
Valid Range
GAIN
RESET
RATE
Proportional gain
Integral time
Derivative time
0.05 to 20
0.1 to 10,000 (seconds)
0 to infinity (seconds)
TA0403.EPS
A4.5 Control Output
The final control output value, OUT, is computed
based on the change in control output
∆
MVn, which is
calculated at each control period in accordance with the
aforementioned algorithm. The PID block in an EJA
performs the velocity type output action for the control
output.
A4.5.1 Velocity Type Output Action
The PID block determines the value of the new control
output OUT by adding the change in control output
calculated in the current control period,
∆
MVn, to the
current read-back value of the MV, MV
RB
(BKCAL_IN). This action can be expressed as:
∆
MVn’ =
∆
MVn * (OUT_SCALE. EU100 Ϫ
OUT_SCALE. EU_0) / (PV_SCALE. EU_100
Ϫ
PV_SCALE. EU_0)
(Direct Acting is False in CONTROL_OPTS)
OUT = BKCAL_IN
Ϫ
∆
MVn’
(Direct Acting is True in CONTROL_OPTS)
OUT = BKCAL_IN
ϩ
∆
MVn’
A4.6 Direction of Control Action
The direction of the control action is determined by the
Direct Acting setting in CONTROL_OPTS.
Value of Direct Acting
Resulting Action
The output increases when the input
PV is greater than the setpoint SP.
The output decreases when the input
PV is greater than the setpoint SP.
True
False
TA0404.EPS
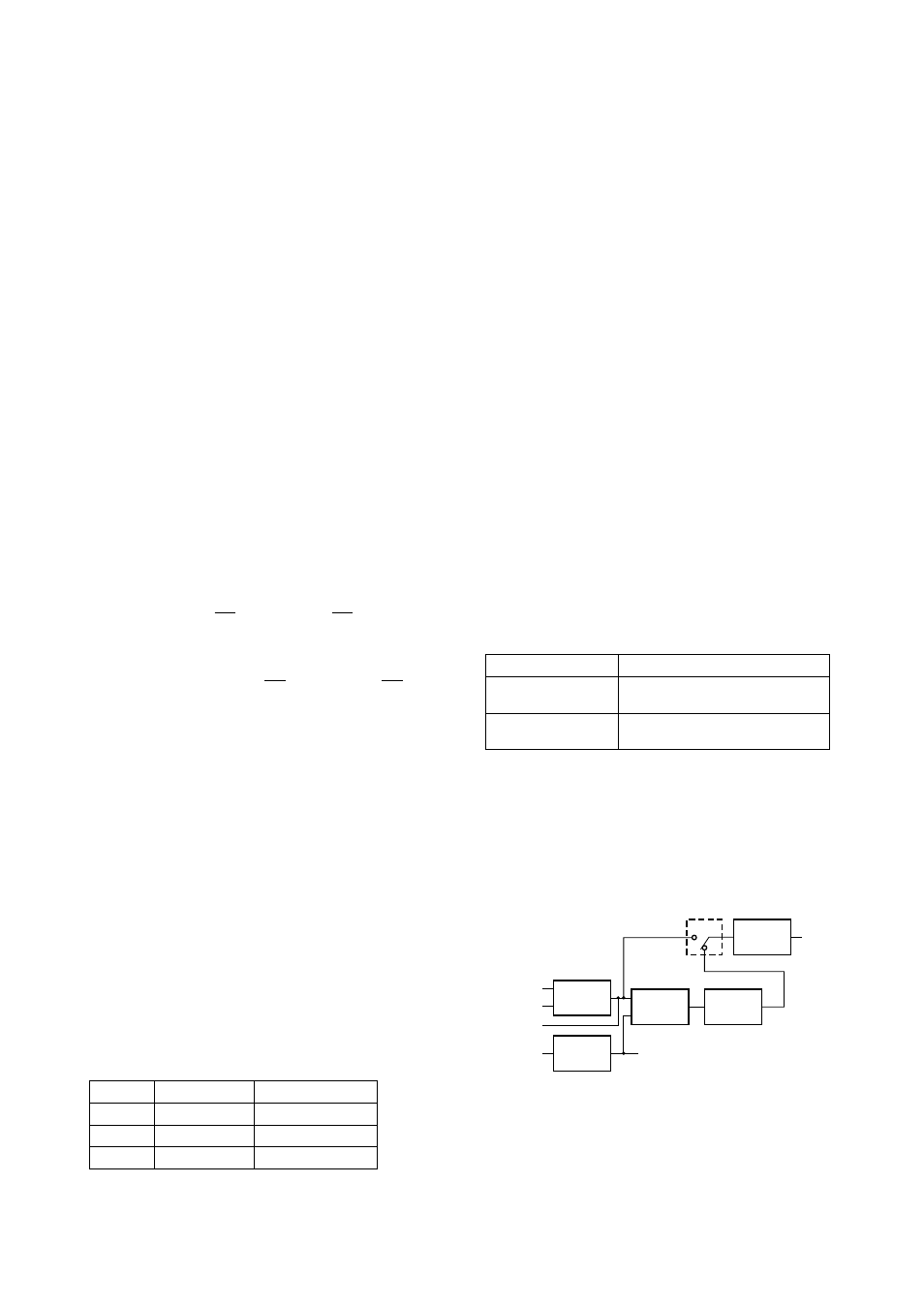
A4.7 Control Action Bypass
The PID control computation can be bypassed so as to
set the SP value in the control output OUT as shown
below. Setting BYPASS to “On” bypasses the PID
control computation.
Setpoint
Control
Feed-
forward
CAS_IN
Filter
IN
PV
BYPASS
SP
RCAS_IN
Output
OUT
FA0402.EPS