A4.14 initialization and manual fallback (iman), A4.15 manual fallback, A4.16 auto fallback – Yokogawa EJA115 User Manual
Page 58
IM 01C22T02-01E
A-20
APPENDIX 4. PID Block
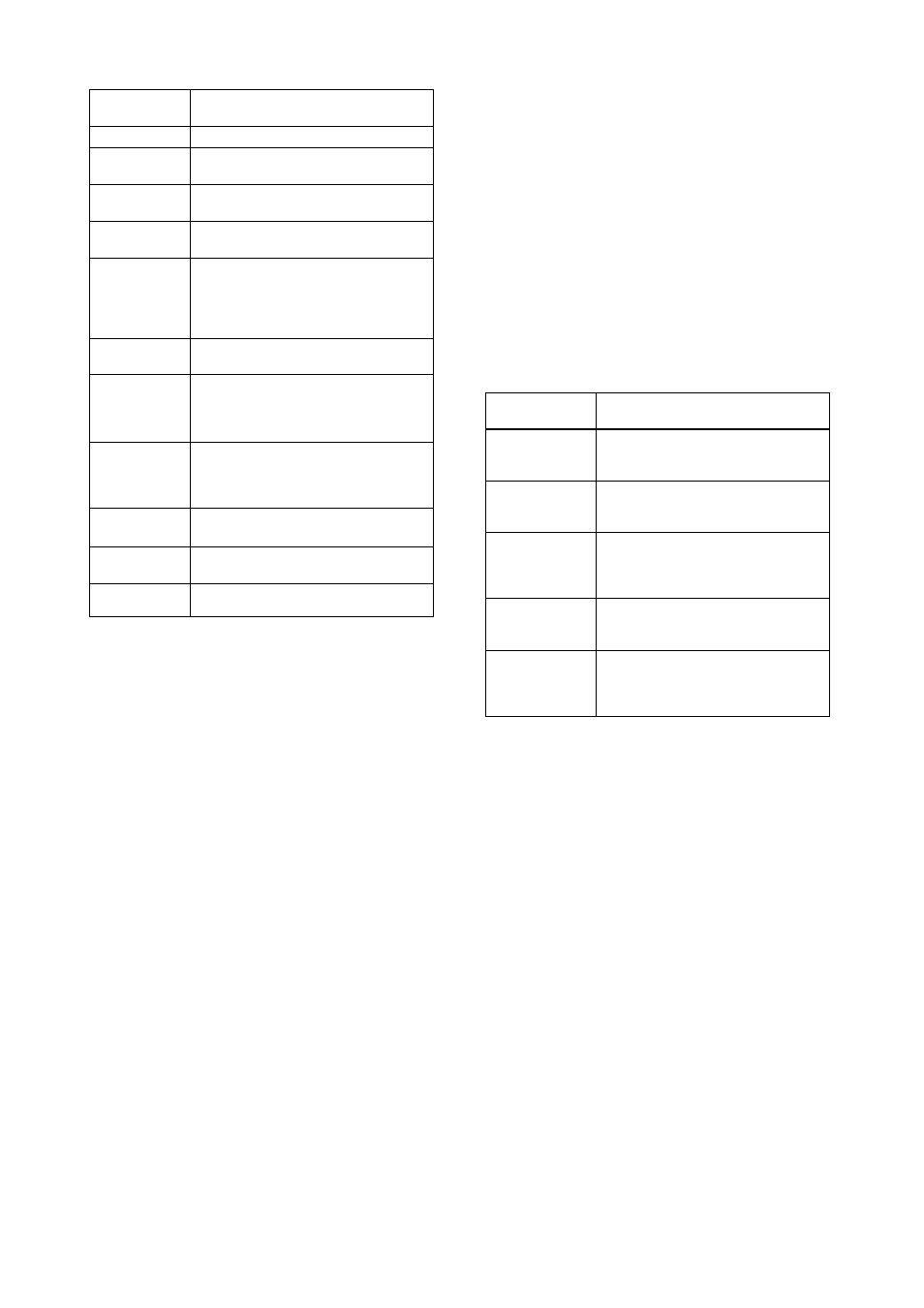
Options in
CONTROL_OPTS
Description
This parameter allows BYPASS to be set.
Equalizes SP to PV when
MODE_BLK.target is set to Man.
Equalizes SP to PV when
MODE_BLK.target is set to ROut.
Equalizes SP to PV when
actual is set to LO or IMAN.
Equalizes SP to RCAS_IN when MODE_
BLK.target is set to RCas, and to CAS_IN
when MODE_BLK.target is set to Cas
when the actual mode of the block is IMan,
LO, Man or ROut.
Set the PID block to a direct acting
controller.
This enables the external tracking function.
The value in TRK_VAL will replace the
value of OUT if TRK_IN_D becomes true
and the target mode is not Man.
This enables TRK_VAL to replace the
value of OUT when the target mode is Man
and TRK_IN_D is true. The actual mode
will then be LO.
Sets the value of PV in BKCAL_OUT and
RCAS_OUT, instead of the value of SP.
Puts the setpoint high/low limits in force in
the Cas or RCas mode.
Disables the high/low limits for OUT in the
Man mode.
Bypass Enable
SP-PV Track
in Man
SP-PV Track
in ROut
SP-PV Track
in LO or IMan
SP-PV Track
retained
Target
Direct Acting
Track Enable
Track in Manual
Use PV for
BKCAL_OUT
Obey SP limits
if Cas or RCas
No OUT limits
in Manual
TA0408.EPS
A4.14 Initialization and Manual
Fallback (IMan)
Initialization and manual fallback denotes a set of
actions in which a PID block changes mode to IMan
(initialization and manual) and suspends the control
action. Initialization and manual fallback takes place
automatically as a means of abnormality handling
when the following condition is met:
• The quality component of BKCAL_IN.status is Bad.
- OR -
• The quality component of BKCAL_IN.status is
Good (c)
- AND -
The sub-status component of BKCAL_IN.status is
FSA, LO, NI, or IR.
The user cannot manually change the mode to IMan.
A mode transition to IMan occurs only when the
condition above is met.
A4.15 Manual Fallback
Manual fallback denotes an action in which a PID
block changes mode to Man and suspends the control
action. Manual fallback takes place automatically as a
means of abnormality handling when the following
condition is met:
• IN.status is Bad except when the control action
bypass is on.
To enable the manual fallback action to take place
when the above condition is met, Target to Manual if
BAD IN must be specified beforehand in
STATUS_OPTS.
The table below shows the options in STATUS_OPTS.
Options in
STATUS_OPTS
Description
Sets the sub-status component of
OUT.status to IFS if IN.status is Bad
except when PID control bypass is on.
Sets the sub-status component of
OUT.status to IFS if CAS_IN.status is
Bad.
Does not regard IN as being in Bad
status when IN.status is Uncertain (to
prevent mode transitions from being
affected when it is Uncertain).
Automatically changes the value of
MODE_BLK.target to MAN when IN falls
into Bad status.
Automatically changes the value of
MODE_BLK.target to Auto (or to Man
if Auto is not set in Permitted) when
CAS_IN falls into Bad status.
IFS if BAD IN
IFS if BAD CAS IN
Use Uncertain
as Good
Target to Manual
if BAD IN
Target to next
permitted mode
if BAD CAS IN
TA0409.EPS
A4.16 Auto Fallback
Auto fallback denotes an action in which a PID block
changes mode from Cas to Auto and continues auto-
matic PID control with the user-set setpoint. Auto
fallback takes place automatically when the following
condition is met:
• IN.status (data status of IN) is Bad except when the
control action bypass is on.
To enable the manual fallback action to take place
when the above condition is met:
• Target to next permitted mode if BAD CAS IN must
be previously specified in STATUS_OPTS.
- AND -
• Auto must be previously set in
MODE_BLK.permitted.