HEIDENHAIN ND 1300 CNC Setup User Manual
Page 44
35
3
CNC Setup
Start or stop too abrupt?
The start and stop acceleration and deceleration of CNC test moves should be decisive, but should not
cause system vibration.
Increase Jerk (decrease nonzero number)
The jerk factor smooths abrupt axis start and stop transitions, by preventing excess acceleration. Adding
jerk can extend the life of system components. The amount of smoothing is inversely proportional to the
jerk factor value; large values of jerk provide small amounts of transition smoothing. Decrease the Jerk
value in small increments to eliminate start or stop vibration. Low Jerk values can significantly degrade
performance. A value of 0 disables jerk.
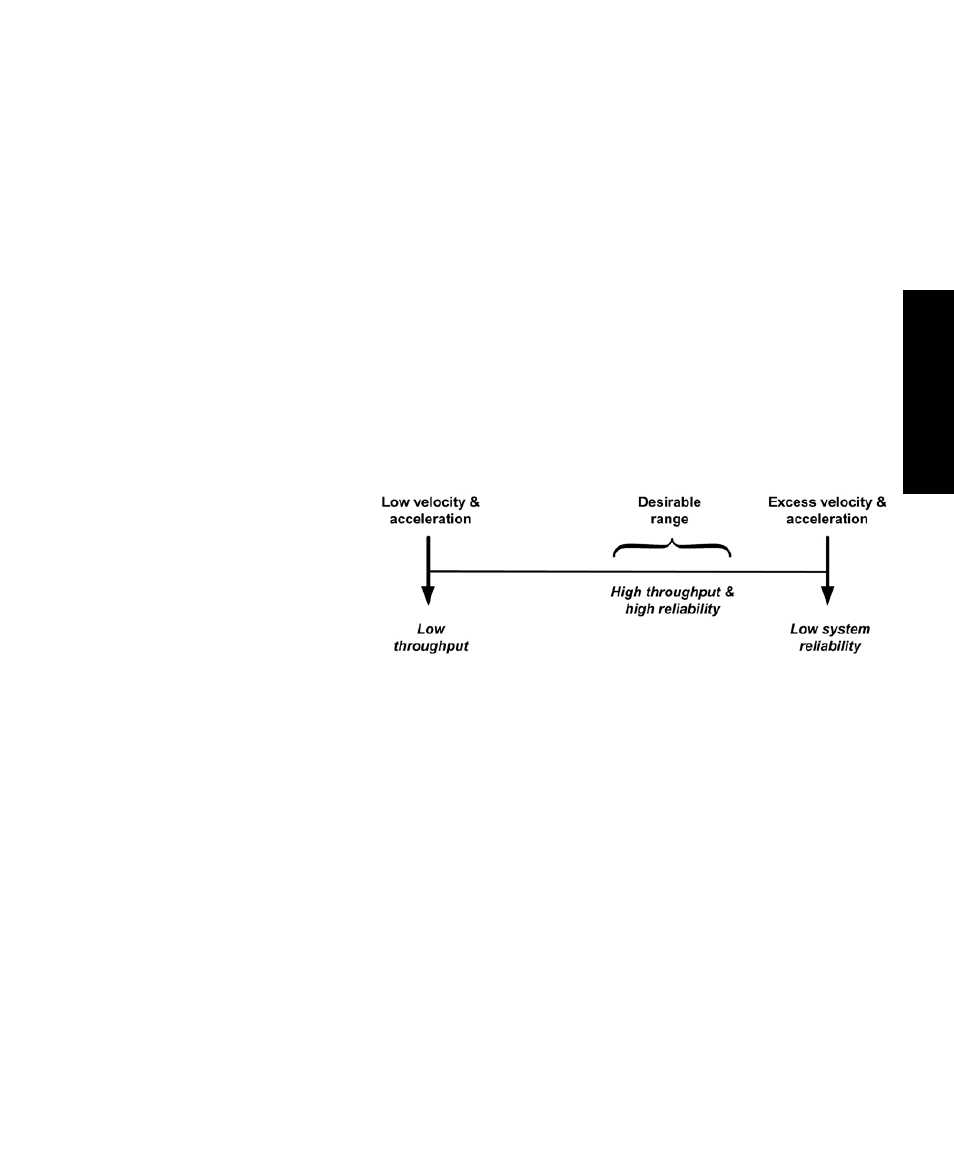
Velocity & acceleration fast enough?
Axis velocity and acceleration determine system throughput. The determination of acceptable velocity and
acceleration is therefore subjective and also dependent on a variety of system components. Maximizing
throughput should not be done at
the expense of system reliability.
High throughput and system reli-
ability represent the two ends of
the velocity/acceleration range.
Increase velocity or acceleration
Some general guidelines for adjusting velocity or acceleration are listed below.
• Set a CNC test distance adequate to observe acceleration, velocity over a reasonable distance and
then deceleration to the final target position.
• Set acceleration high enough to achieve the desired velocity quickly.
• Increase velocity and acceleration in small increments to observe the impact of the adjustments
on PID loop performance.
• Avoid setting velocity and acceleration at the operational limits of the system. Leave some
capability in reserve.
Following errors are generated when an axis is unable to keep up with the predicted axis path calculated by
the QC-320. It is possible that following error warnings will be generated on some CNC test moves until
the proportional gain is increased. Following error warnings are also more likely to be generated at high
axis accelerations and velocities.
Tuning Flow Chart Block Descriptions