HEIDENHAIN ND 1300 CNC Setup User Manual
Page 31
23
3
CNC Setup
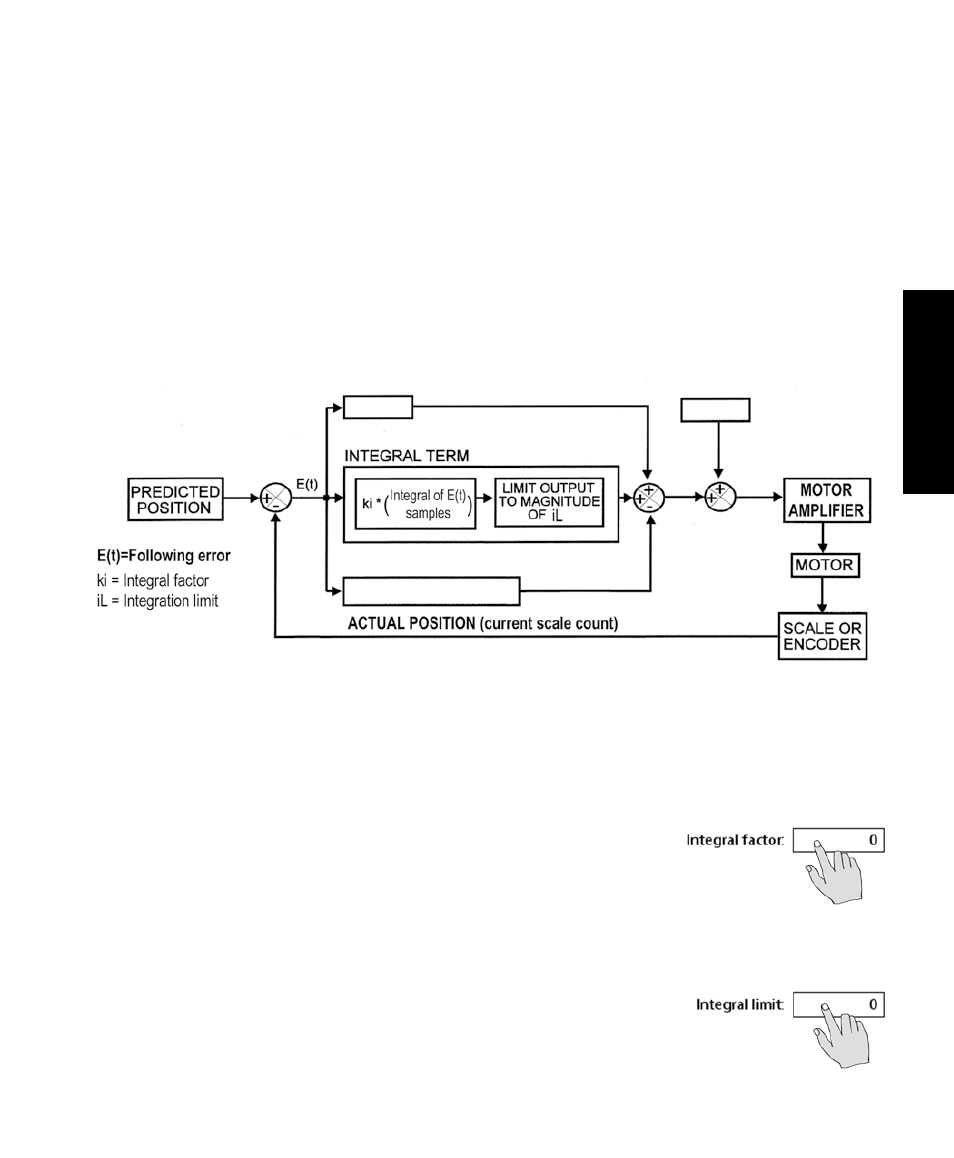
Integral PID control term
In some servo systems, as an axis approaches its final predicted position, the following error falls to such
small values that the proportional gain term alone is inadequate to drive the axis the final small distance to
its target. This is usually due to high-mass stages, or stages with significant static friction. The integral
PID control term is added to increase PID loop gain for very small following errors. This additional gain
is achieved by summing a series of small following error samples at the end of the CNC move to create a
total motor drive capable of moving the axis into the continuation zone.
The integral term consists of the Integral factor and the Integral limit. The integral factor is a multiplier
that increases the value of small following error samples, and the Integral limit defines the maximum value
of integral term that will be used.
The size of the integral factor determines how quickly the motor will be driven by a series of small follow-
ing error samples. Large integral factors quickly add up to significant motor drive signals. This has the
advantage of moving the last small distance into the continuation zone quickly, but has the disadvantage
that too much drive might be created, causing the axis to move through the continuation zone. If the
axis moves through the continuation zone, it must be driven back into the continuation zone again from
the other direction. Very large integral factors can lead to axis oscillations
around the continuation zone at the end of the CNC move. Enter the required
integral factor into the integral factor field.
The integral limit prevents unstable PID loop behavior by limiting the overall integral PID control term
to a specified maximum value. Limiting the total drive of the integral term has the advantage of allowing
relatively large integral factors that produce rapid moves into the continuation zone while preventing the
excess drive that could drive the axis through the continuation zone and lead to
axis oscillations. Enter the integral limit into the Integral Limit field.
Discussion of PID Control Parameters