B&G Zeus Touch 12 User Manual
Page 45
| 45
Autopilot |
Zeus Touch installation manual
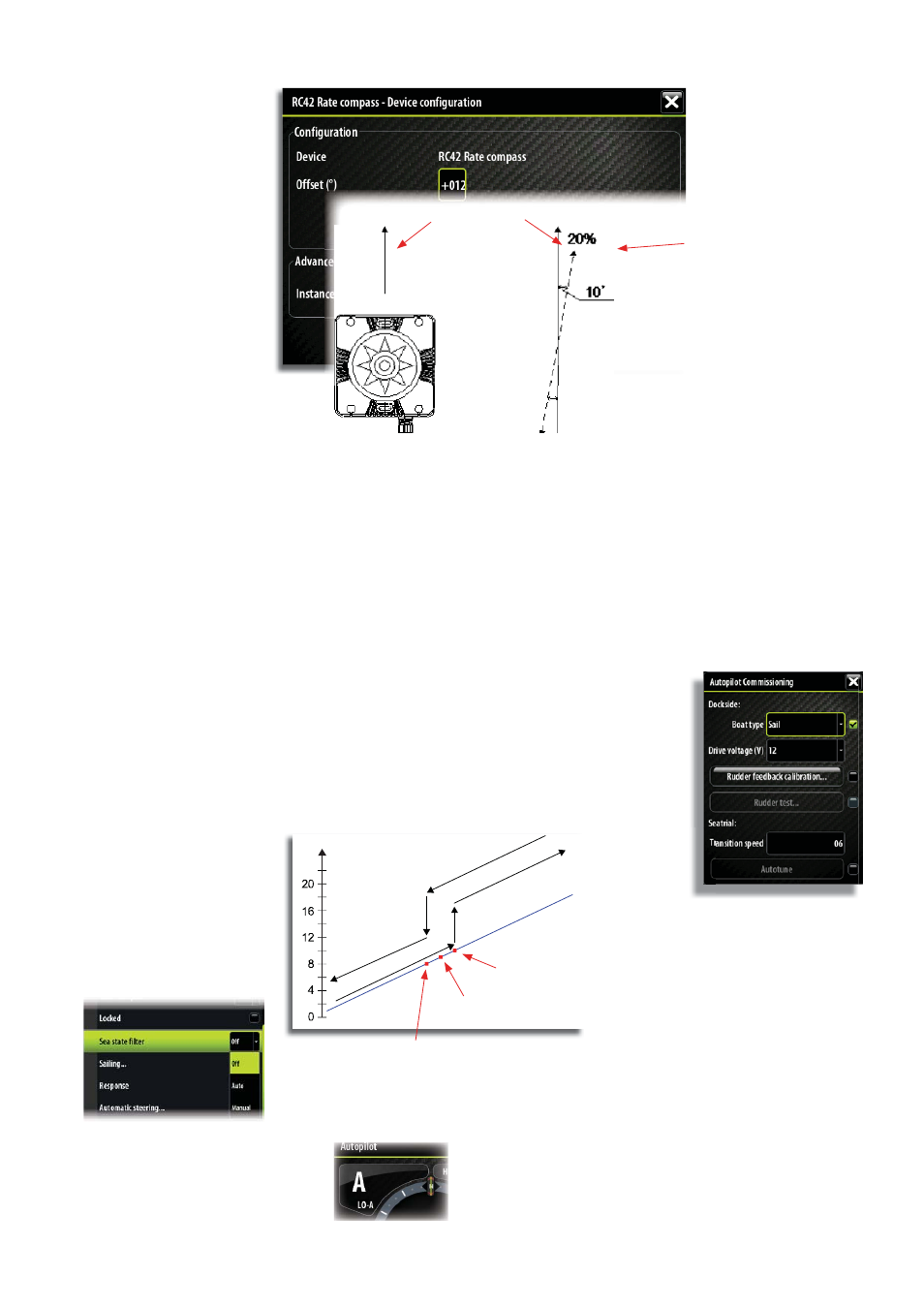
Magnitude of local fi eld in
% of earth’s magnetic fi eld.
LUBBER LINE
Direction of local fi eld with
respect to lubber line. It can
also be on the reciprocal.
1.
Find the bearing from the boat position to a visible object. Use a chart or a chart plotter
2.
Steer the boat so that the center line of the boat is aligned with the bearing line pointing towards the
object
3.
Change the off set parameter so that the bearing to the object and the compass readout becomes
equal. Refer graphic above
Note:
Make sure that both the compass heading and the bearing to the object have the same
unit (°M or °T).
Setting the Transition speed (HI/LO)
This is the speed at which the system automatically changes from LO to HI steering param-
eters.
On power boats it is recommended that you set a value that
represents the speed where the hull begins to plane or the
speed where you change from slow to cruising speed.
On sailboats the transition speed should be set to 3-4 knots to
give the best response in a tack.
A deadband of 2 knots is incorporated to prevent oscillation of
HI/LO settings when vessel is travelling at the transition speed.
Transition to LO parameters with
increasing speed: 10kn
Transition speed set to 9kn
Transition to HI parameters with
decreasing speed: 8kn
LO
response
HI r
esponse
Active response parameter set is shown in the autopilot popup, and the following abbrevia-
tions are used:
HI-A
High response parameters set automatically
LO-A
Low response parameters set automatically
HI-M
High response parameters set manually
LO-M
Low response parameter set manually