B&G Zeus Touch 12 User Manual
Page 43
| 43
Autopilot |
Zeus Touch installation manual
Note:
If the boat uses power assisted steering, it is important that the
engine or electric motor used to enable the power assist steering is
turned on prior to this test.
Stand CLEAR of the wheel and do not attempt to take manual
control of the wheel during this test!
•
When this test is started the autopilot computer will issue a series of
PORT and STBD rudder commands and automatically verify correct
rudder direction. It detects minimum power to drive the rudder
and reduces the rudder speed if it exceeds the maximum preferred
speed (8°/sec.) for autopilot operation. The system will also detect
whether the drive unit is a reversible motor or if a solenoid valve is
operated.
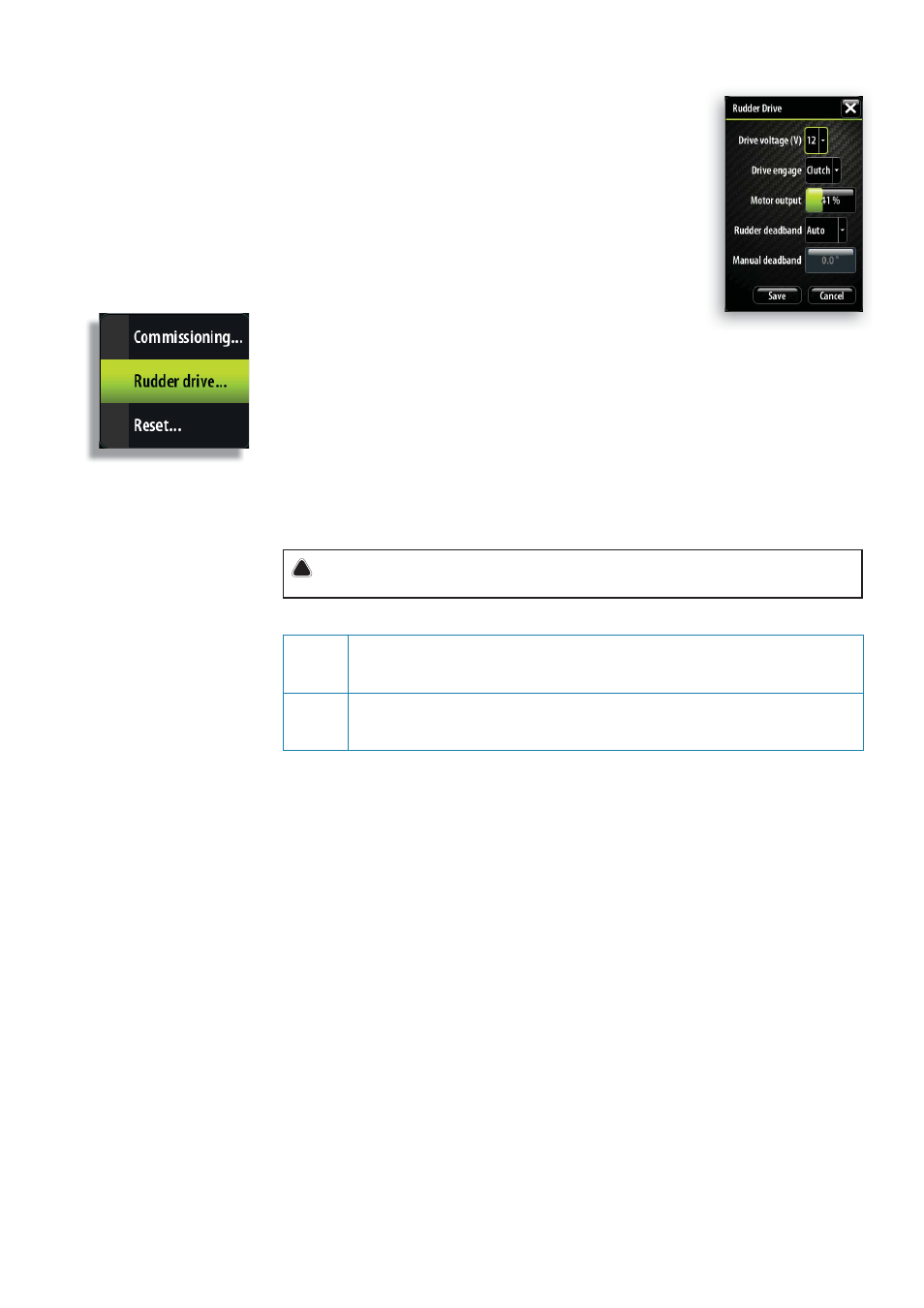
Rudder drive setup
The rudder drive setup controls how the autopilot computer controls the steering system.
Drive voltage
Voltage specifi ed for your drive unit.
The Drive unit voltage setting does not apply when the system operates solenoids on a con-
tinuous running pump/steering gear. Hence, the output voltage to the solenoids will be the
same as the input voltage.
Refer to the drive unit table in the AC12N/AC42N Installation manual or to your drive unit
documentation for information
!
Warning:
Selection of improper voltage level for your drive unit may damage both the
drive unit and the AC12N/42N even if the protection circuits are activated.
Drive engage
Clutch
This is the default setting and it allows you to steer the boat with the helm or
wheel when in STBY mode (FU and NFU modes) as well as in all auto steering
modes
Auto
This option is typically used to switch between two rudder speeds on a continu-
ous running pump, used when diff erent rudder speeds are required for automatic
and Follow-up/Non-Follow-up steering
Motor output
Shows the amount of power needed to achieve the correct rudder speed. The reading is
obtained from the Rudder test.
The automatically set value may be increased or decreased.
Rudder deadband
This parameter is used to prevent the rudder from hunting. The reading is obtained from the
Rudder test which optimizes the deadband to the speed of the boat and the pressure on the
rudder.
If the auto-setting does not perform properly due to high inertia from the wheel or a loose
steering gear, it can be adjusted manually. Find the lowest possible value that will prevent the
rudder from continuous hunting. A wide deadband will cause inaccurate steering.
Note:
The rudder deadband setting is not available when the autopilot is confi gured for
Virtual Rudder Feedback.
Seatrials
A seatrial can only be performed if the dockside settings are completed and confi rmed.
The seatrial must always be performed in open waters at a safe distance from other traffi
c.
Note:
You can switch the autopilot to standby mode and take manual control of the boat at
any time during the seatrial by pressing the
STBY/AUTO
key.
The following seatrial calibration should be done:
•
Compass calibration; used to automatically compensate for on-board magnetic interference
e
e