4 startup, Figure 3.2 main control boards – Rockwell Automation 1336T Master/Slave Parallel AC Drv User Manual
Page 22
1336 FORCE-5.19 – August, 2000
3-4
Startup
B. Ground each lead one at a time at motor end and check
continuity with a meter at the drive end. This must be done to
verify drive output phase connections to ensure no leads are
swapped from slave to master. (Severe motor damage will occur
if leads are swapped.)
C. Connect leads at motor end and megger U (L1 or L11), V (L2 or
L22), W (L3 or L33) to ground.
Inverter Bridge Checks- Check the inverter bridge for grounds and
shorts.
A. Measure each incoming phase to ground.
B Measure each phase to the DC+ and DC- bridge inputs.
C. Measure DC+ and DC- bridge inputs to ground.
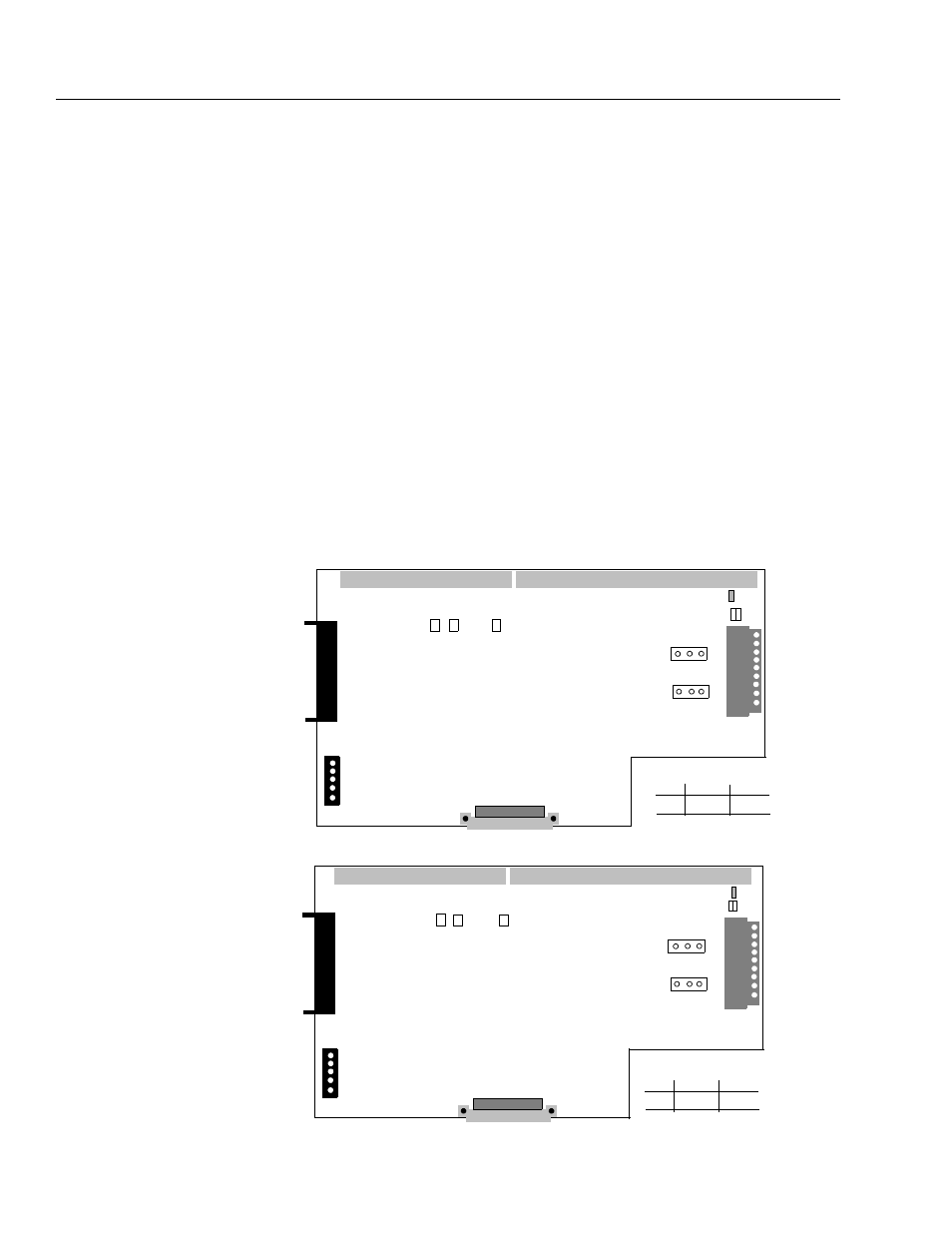
Jumper & Dip Switch Checks - Use the system schematics and
check the jumpers and switches on the Main Control board and
Adapter boards of both the Master and Slave drive. The FORCE User
Manual (1336T-5.12) provides in depth information on switch and
jumper settings for all adapter boards. Main Control Board Jumpers
J3 and J4 control encoder voltage selection as detailed in Figure 3.2.
Figure 3.2
Main Control Boards
Control Board (Slave Drive)
Control Board (Master Drive)
TB12
TB10
J5
J7
TB11
Encoder
and
Brake
Control
Signals
Interface to Gate Driver Board
Drive
to
Drive
Interface
To Slave Drive
To Slave Drive
Base
Driver
Board
Control
Signals
5V
12V
5V
12V
1 2 3
1 2 3
Jumper
+5VDC +12VDC
J3
1-2
2-3
J4
1-2
2-3
Encoder
Feedback (J3 & J4)
must be set for
the same voltage
Encoder Voltage Selection
TB12
TB10
J5
TB13
J1
J7
TB11
Encoder
and
Brake
Control
Signals
Interface to Gate Driver Board
Drive
to
Drive
Interface
Base
Driver
Board
Control
Signals
5V
12V
5V
12V
1 2 3
1 2 3
Jumper
+5VDC +12VDC
J3
1-2
2-3
J4
1-2
2-3
Encoder
Feedback (J3 & J4)
must be set for
the same voltage
Encoder Voltage Selection
To Master Drive
To Master Drive
J3
J4
J3
J4
EN VP
CP
Slave
Master
EN VP
CP
TB13
J1