Seiwa Si-Tex Vector 3D GPS User Manual
Page 38
42
39
Appendix B: Specifications
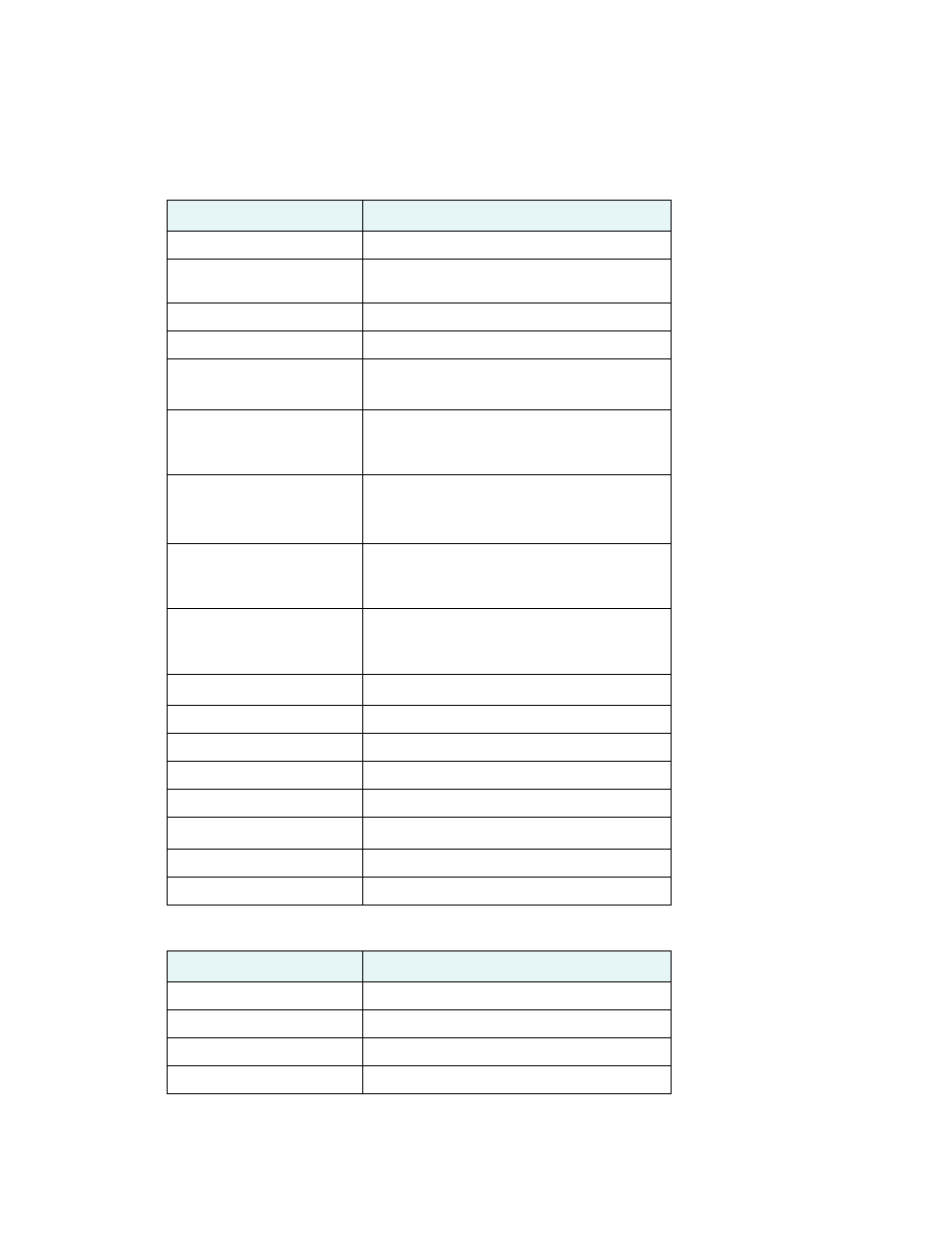
Table B-1 through Table B-5 provide the 3D’s GPS sensor, communication, power, mechanical, and
environmental specifications
.
Table B-1: GPS sensor specifications
Item
Specification
Receiver type
L1, C/A code with carrier phase smoothing
Channels
Two 12-channel, parallel tracking
(Two 10-channel when tracking SBAS)
SBAS tracking
2-channel, parallel tracking
Update rate
Standard 10 Hz, optional 20 Hz (position and heading)
Horizontal accuracy
< 1.0 m 95% confidence (DGPS
1
)
< 4.0 m 95% confidence (autonomous, no SA
2
)
Heading accuracy
< 0.75° rms
Normal operation: GPS
Coasting (no GPS): Gyro
Heave accuracy
< 30 cm rms
5
Normal operation: GPS
Coasting (no GPS): None
Pitch accuracy
< 1.5° rms
Normal operation: GPS
Coasting (no GPS): Inertial sensor
Roll accuracy
< 1.5° rms using accelerometer
Normal operation: Inertial sensor
Coasting (no GPS): Inertial sensor
Rate of turn
90
°
/s maximum
Cold start
< 60 s typical (no almanac or RTC)
Warm start
< 20 s typical (almanac and RTC)
Hot start
< 1 s typical (almanac, RTC, and position)
Heading fix
< 10 s typical (valid position)
Compass safe distance
30 cm (11.8 in)
4
Maximum speed
1,850 kph (999 kts)
Maximum altitude
18,288 m (60,000 ft)
Table B-2: Communication specifications
Item
Specification
Serial ports
2 full-duplex RS-232
Baud rates
4800, 9600, 19200, 38400, 57600, 115200
Correction I/O protocol
RTCM SC-104
Data I/O protocol
NMEA 0183, NMEA 2000