Seiwa Si-Tex Vector 3D GPS User Manual
Page 16
17
15
Chapter 2: Installation
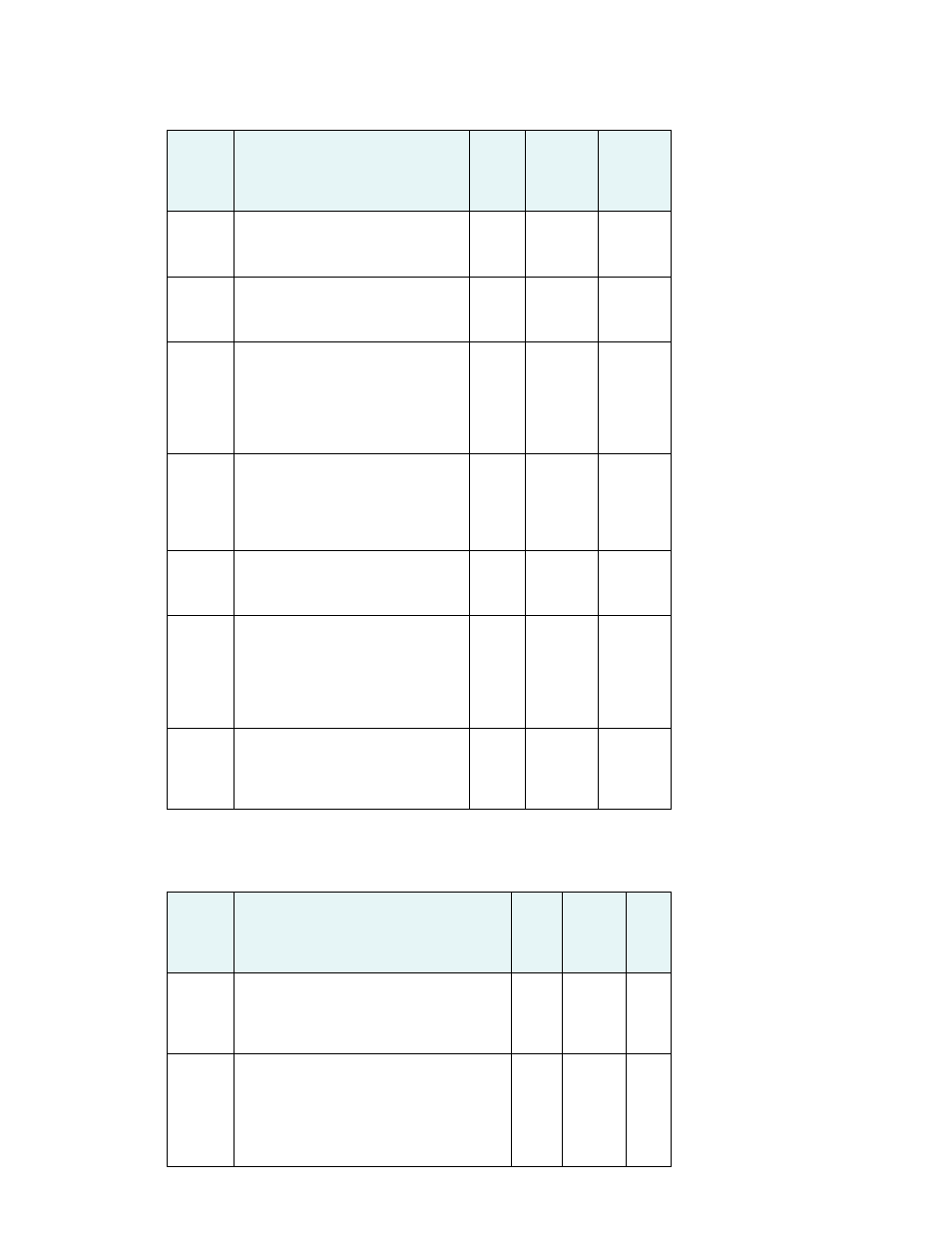
Table 2-2: Received messages based on a request (continued)
PG No.
(PGN)
Description
Level
Default
Update
Rate
(msec)
Freq (Hz)
059904
ISO Request
Request the transmission of a specific PGN,
addressed or broadcast.
B
On Request
On Request
060928
ISO Address Claim
Used to identify to other ECUs the address
claimed by an ECU.
B
On Request
On Request
126996
Product Information
NMEA 2000 database version supported,
manufacturer’s product code, NMEA 2000
certification level, Load Equivalency
number, and other product-specific
information.
B
On Request
On Request
126464
Receive/Transmit PGNs group function
The Transmit / Receive PGN List Group
type of function is defined by first field. The
message will be a Transmit or Receive PGN
List group function.
B
On Request
On Request
129538
GNSS Control Status
GNSS common satellite receiver parameter
status.
B
On Request
On Request
129545
GNSS RAIM Output
Used to provide the output from a GNSS
receiver's Receiver Autonomous Integrity
Monitoring (RAIM) process. The Integrity
field value is based on the parameters set in
PGN 129546 GNSS RAIM Settings.
B
On Request
On Request
129546
GNSS RAIM Settings
Used to report the control parameters for a
GNSS Receiver Autonomous Integrity
Monitoring (RAIM) process.
B
On Request
On Request
Table 2-3 shows the transmitted PGNs with their default update rate with the 3D in NMEA 2000 mode
.
Table 2-3: Transmitted messages
PG No.
(PGN)
Description
Level
Default
Update
Rate
(msec)
Freq
(Hz)
126992
System Time
The purpose of this PGN is twofold: To provide a
regular transmission of UTC time and date. To
provide synchronism for measurement data.
B
1000
1
127250
Vessel Heading
Heading sensor value with a flag for True or
Magnetic. If the sensor value is Magnetic, the
deviation field can be used to produce a Magnetic
heading, and the variation field can be used to correct
the Magnetic heading to produce a True heading.
B
100
10