Soft-start, Remote setpoint, Control mode – NOVUS Controller N1100 User Manual
Page 3: Pid automatic mode
N1100 Controller
NOVUS AUTOMATION
3/11
PROMPT
TYPE
ACTION
Off
Disabled
Output is not used as alarm.
Ierr
Sensor Break
(input Error)
Activated when the input signal of PV is
interrupted, out of the range limits or Pt100
in short-circuit.
Rs
Event
(ramp and Soak)
Can be activated at a specific segment of
program.
rfail
-
Reserved
Lo
Minimum value
(Low)
SPAn
PV
Ki
Maximum value
(High)
SPAn
PV
Difl
Minimum
Differential
(differential
Low)
Positive SPAn Negative SPAn
SV
PV
SV - SPAn
SV
PV
SV - SPAn
Difk
Maximum
Differential
(differential
High)
SV
PV
SV + SPAn
SV
PV
SV + SPAn
Positive SPAn
Ngative SPAn
Dif
Differential
(differential)
SV
PV
SV + SPAn
SV - SPAn
SV
PV
SV - SPAn
SV + SPAn
Positive SPAn
Nagative SPAn
Table 3 – Alarm functions
Where SPAn refers to Setpoints of Alarm “SPA1”, “SPA2”, “SPA3”
and “SPA4”.
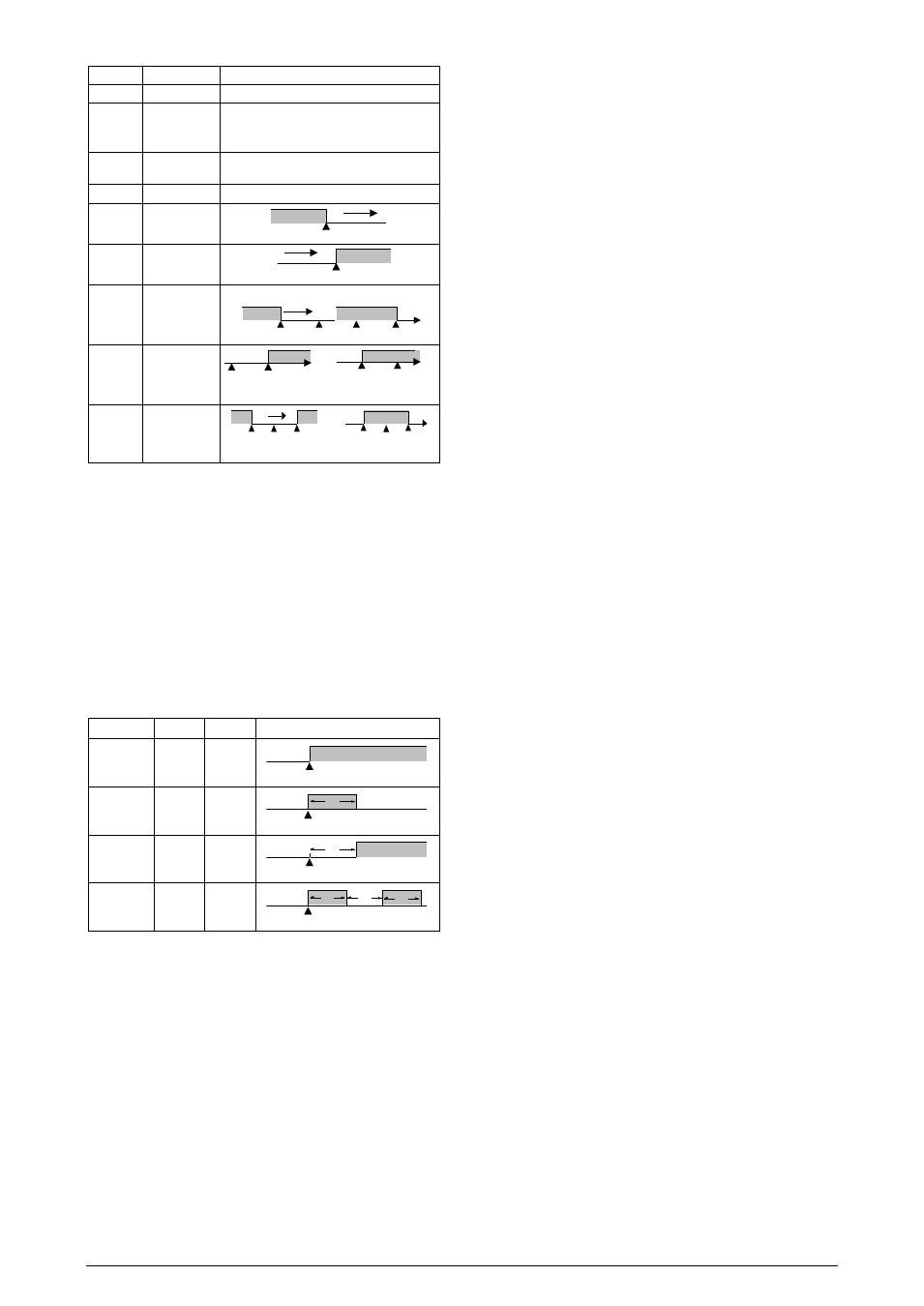
ALARM TIMER MODES
The controller alarms can be configured to perform 4 timer modes:
• Continuous (normal mode).
• One pulse with defined duration;
• Delayed activation;
• Repetitive pulses;
The illustrations in Table 4 show the behavior of the alarm output for
various combinations of times T1 and T2. The timer functions can be
configured in parameters A1t1, A1t2, A2t1 and A2t2.
OPERATION
T 1
T 2
ACTION
Normal
operation
0
0
Alarm Event
Alarm
Output
Activation for
a defined time
1 s to
6500 s
0
Alarm Event
Alarm
Output
T1
Activation with
delay
0
1 s to
6500 s
Alarm Event
Alarm
Output
T2
Intermittent
activation
1 s to
6500 s
1 s to
6500 s
Alarm Event
Alarm
Output
T1
T2
T1
Table 4 - Temporization Functions for the Alarms
The LEDs associated to the alarms will light when the alarm
condition is recognized, not following the actual state of the output,
which may be temporarily OFF because of the temporization.
ALARM INITIAL BLOCKING
The initial blocking option inhibits the alarm from being recognized
if an alarm condition is present when the controller is first energized.
The alarm will be enabled only after the occurrence of a non-alarm
condition followed by a new occurrence for the alarm.
The initial blocking is useful, for instance, when one of the alarms is
configured as a minimum value alarm, causing the activation of the
alarm soon upon the process start-up, an occurrence that may be
undesirable.
The initial blocking is disabled for the sensor break alarm function.
SQUARE ROOT EXTRACTION
When the input type is configured as SQRT the controller assumes
the input as a 4-20 mA while extracting the square root of the applied
input signal.
ANALOG RETRANSMISSION OF PV AND SP
The analog output, when not used for control purposes, is available
for retransmitting the PV and SP values in 0-20 or 4-20 mA. This
analog output is electrically isolated from other inputs and outputs.
The analog output signal is scalable, with the output range defined by
the values programmed in the parameters “SPLL” and “SPkL”.
It is possible to obtain a voltage output by installing a resistor shunt
(550 Ω max.) to the current output terminals (terminals 7 and 8). The
actual resistor value depends on the desired output voltage span.
SOFT-START
The soft-start feature avoids abrupt variations in the power delivered
to the load regardless of the system power demand.
This is accomplished by defining a limiting ramp for the control output.
The output is allowed to reach maximum value (100 %) only after the
time programmed in the soft-start parameter has elapsed.
The Soft-start function is generally used in processes that require slow
start-up, where the instantaneous application of 100 % of the available
power to the load may cause damages to parts of the system.
In order to disable this function, the soft-start parameter must be
configured with 0 (zero).
REMOTE SETPOINT
The controller can have its Setpoint value defined by an analog,
remotely generated signal. This feature is enabled through the
channels I/O3, I/O4 or I/O5 when configured as digital inputs and
configured with the function rsp (Remote SP selection) or through
the parameter E.rsp. The remote Setpoint input accepts the signals
0-20 mA, 4-20 mA, 0-5 V and 0-10 V.
For the signals of 0-20 and 4-20 mA, a shunt resistor of 100 Ω is
required between terminals, as shown in Figure 4c.
CONTROL MODE
The controller can operate in two different manners: Automatic mode
or Manual mode.
The parameter “
avto
” defines the control mode to be adopted.
In Automatic mode the controller defines the amount of power to be
applied on the process.
In Manual mode the user himself defines this amount of power. The
user can then adjust the MV percentage while displaying PV/MV.
PID AUTOMATIC MODE
For the Automatic mode, there are two different strategies of control:
PID automatic control and ON/OFF automatic control.
PID control has its action based on a control algorithm that takes into
account the deviation of PV with respect to SP, the rate of change of
PV and the steady state error. These parameters are particular to a
system and can be obtained automatically by the controller’s Auto
Tune feature (Atvn parameter).
On the other hand, the ON/OFF control (obtained when Pb=0)
operates with 0 % or 100 % of power, when PV deviates from SP.
The determination of parameters Pb, Ir and Dt is described in
the item DETERMINATION OF PID PARAMETERS of this manual.