Ksetparamdone (frame id 20, Kstartintervalmode (frame id 21, Kstopintervalmode (frame id 22 – PNI CompassPoint Prime User Manual
Page 52: Kpowerup (frame id 23, Ksetacqparams (frame id 24, 20 ksetparamdone (frame id 20, 21 kstartintervalmode (frame id 21, 22 kstopintervalmode (frame id 22, 23 kpowerup (frame id 23, 24 ksetacqparams (frame id 24
PNI Sensor Corporation
DOC# 1014177 r08
Prime User Manual
– July 2011
Page 46
7.3.20 kSetParamDone (frame ID 20
d
)
This frame is the response to kSetParam frame. The frame has no payload.
7.3.21 kStartIntervalMode (frame ID 21
d
)
This frame commands the module to output data at a fixed time interval, otherwise
known as Push Mode. See kSetAcqParams. The frame has no payload.
7.3.22 kStopIntervalMode (frame ID 22
d
)
This frame commands the module to stop data output when in Push Mode. The frame
has no payload.
7.3.23 kPowerUp (frame ID 23
d
)
This frame is sent from the module after waking up from Sleep Mode. The frame has no
payload. Since the module was previously powered down which drives the RS-232
driver TX line low (break signal), it is recommended to disregard the first byte.
7.3.24 kSetAcqParams (frame ID 24
d
)
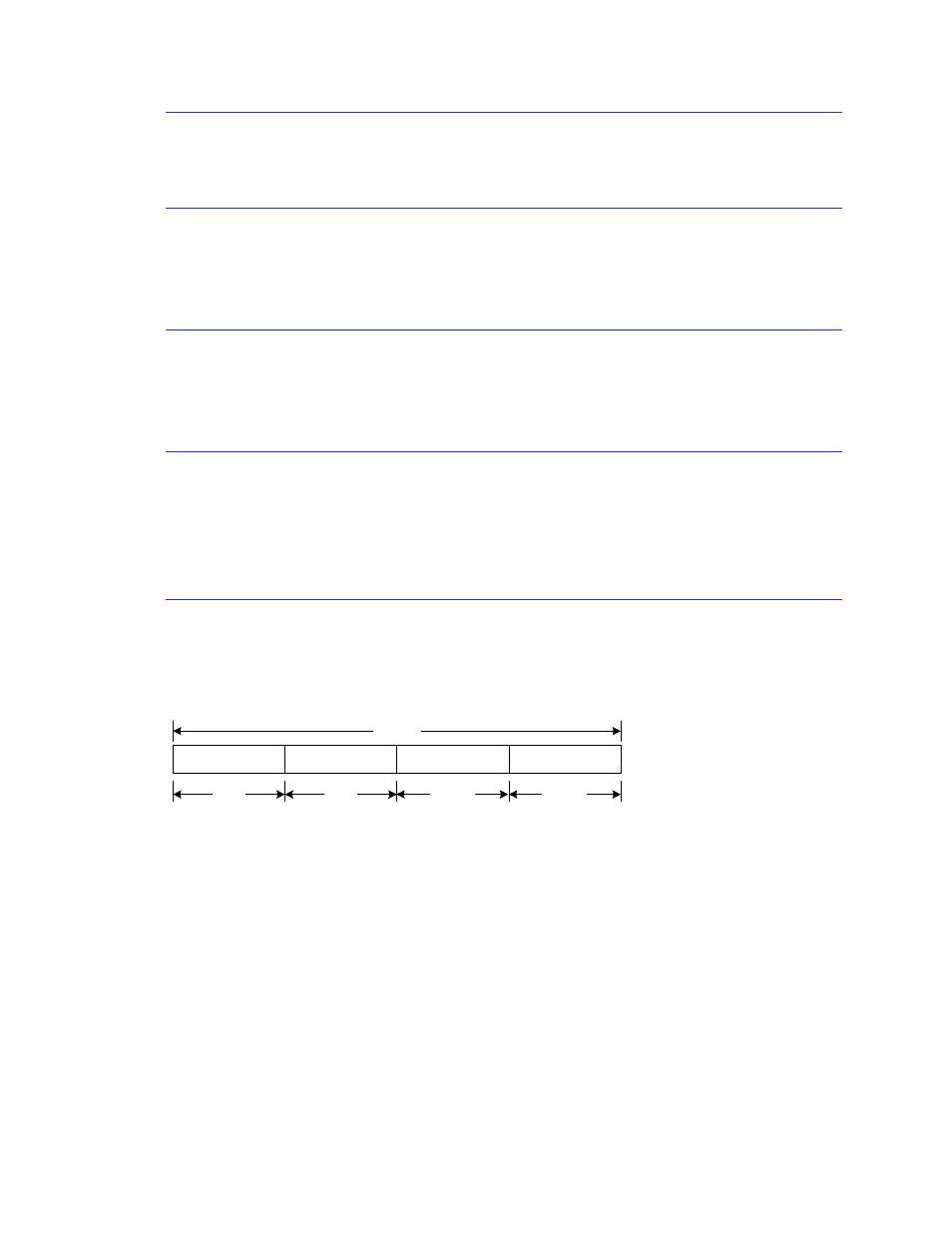
This frame sets the sensor acquisition parameters in the unit. The payload should contain
the following:
PollingMode
FlushFilter
SensorAcqTime
IntervalRespTime
UInt8
UInt8
Float32
Float32
Payload
PollingMode:
This flag sets whether output will be presented in Poll or Push Mode. Poll Mode is
TRUE and is the default. Poll Mode should be selected when the host system will
poll the TCM for data. Push Mode should be selected if the user will have the TCM
output data at a relatively fixed rate to the host system. See kStartIntervalMode for
starting a Push Mode command.
FlushFilter:
Setting this flag to TRUE results in the FIR filters being flushed (voided out) after
each measurement reading. This can be useful if a single, accurate reading is desired
and there is sufficient time to re-populate the filters. The default is FALSE.