Required performance level (pl) – NORSTAT Safety Relays User Manual
Page 36
21
The replacement of EN 954-1
Previously, the machine constructing engineer had, according to the EN 954-1 (safety-related parts of control systems, part 1: General design principles) to proof the compliance of the
general safety requirements according to the European machinery directive.
This standard demanded a risk analysis with the resulting safety categories (B, 1, 2, 3, 4). B stands for low and almost no safety respectively, 4 stands for high safety. The safety devices
for a system were chosen with the safety category.
The EN 954-1 was replaced because programmable electronic systems were considered insufficiently and the time response (e.g. testing intervals, life cycles) and the failure probability of
components were not considered. The following
standards EN 13849-1 (safety of machines – safety-related parts of control systems, part 1: General design principles) and EN 62061
(safety of machines – functional safety of electrical, electronic and programmable electronic control systems) create remedy and consider the above approaches.
Definition of the safety requirements
It is divided into two parts: Safety of machines and the functional safety.
Safety of machines
After finished risk evaluation according to EN ISO 14121-1, measures for reducing of the detected risks will be defined. Afterwards, the risks will be reduced up to an acceptable residual
risk.
Functional safety
The functional safety follows from the results of the machinery safety. The functional safety is divided into 6 steps:
1. Definition of the safety-technological requirements
2. Selection of the required performance
3. Safety design
4. Definition of the achived performance
5. Verification
6. Validation
Definition of the safety-technological requirements
The required safety function characteristics are defined e.g. ESPD-function with automatic start, no simultaneity, etc. and a detailed description with the necessary interfaces to the other parts of
control systems will be prepared.
Selection of the required performance
The definition is done with a risk graph. For new systems it can be generally done with two standards:
EN 13849-1 (Safety of machines – safety-related parts of control systems, part 1: General design principles)
With the risk graph it is possible to investigate all safety-related functions and areas of a machine respectively. The results are the so-called Performance Level / PL (a-e). The PL is
needed for the selection of the safety setup and the corresponding components including wiring.
The a stands for low safety and the e for high safety.
a
b
c
d
e
starting point
high safety
P2
P1
P2
P1
P2
P1
P2
P1
F1
F2
F1
F2
S1
S2
low safety
S - severity of injury
S1 - slight injury
(usually reversible)
S2 - serious injury, including death
(usually irreversible)
F - frequency and duration of exposure to the hazard
F1 - rarely to many a time residence
F2 - more likely to permanent residence
P - the probability of avoidance of a hazardous event
P1 - possible under certain conditions
P2 - hardly possible
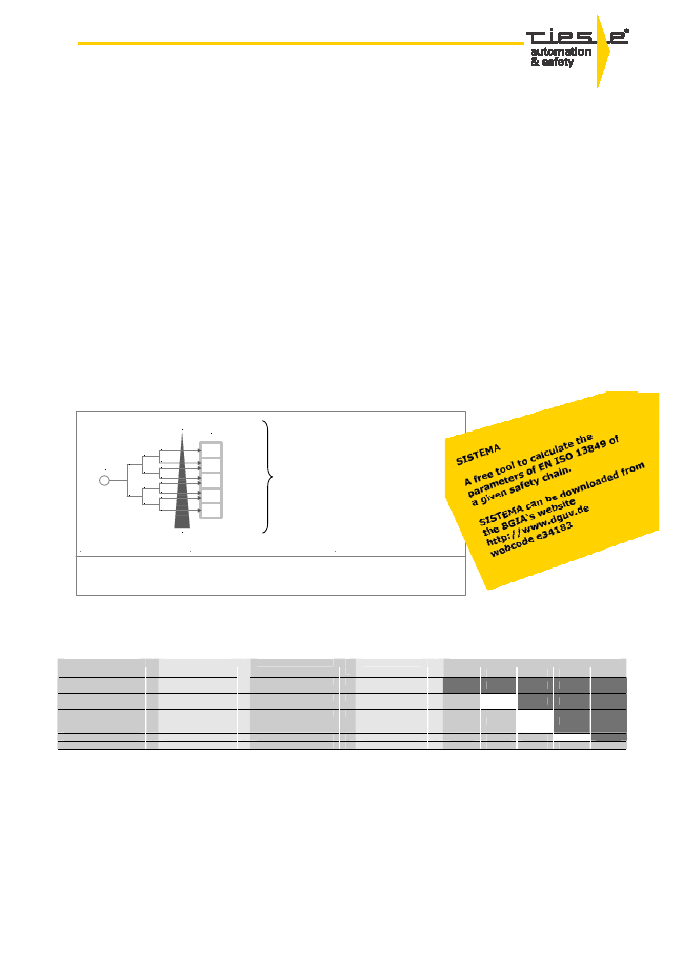
EN 62061 (Safety of machines - functional safety of safety-related electrical, electronic and programmable electronic control
systems)
With the risk graph it is possible to investigate all safety-relevant functions and areas of a machine respectively. The results are the so-called Safety Integrity Level / SIL (1 - 3).The SIL is
required
for the selection of the safety setup and the corresponding components including wiring. The 1 stands for low safety and the 3 for high safety.
Class K (=F+P+A)
Effect
and severity
S
Frequency and
duration
F
Probability
P
Avoidance
A
3-4
5-7
8-10
11-13
14-15
Death, losing an eye or
arm
4
≤ 1 h
5
very high
5
SIL2
SIL2
SIL2
SIL3
SIL3
Permanent, losing a
finger
3
> 1 h - ≤ 1day
5
likely
4
OM
SIL1
SIL2
SIL3
Reversible, requiring
attention from a medical
practioner
2
> 1 day - ≤ 2 weeks
4
possible
3
impossible
5
OM
SIL1
SIL2
Requiring first help
1
> 2 weeks - ≤ 1 year
3
rarely
2
possible
3
OM
SIL1
> 1 year
2
negligible
1
likely
1
OM = other measures advised
Safety design
The safety function described in step 1 is designed. The single components are defined, e.g. safety relais SAFE CL for the ESPD-function.
Definition of the achived performance
The actual performance of the safety function is detected. The safety function is divided in sensors, logic and actuators. The parameters required to calculation are provided by the component
manufactures.
Verification
For each single safety function, the in step 4 achieved performance has to be bigger or equal as the in step 2 defined required performance. If this is not the case the safety function has to be
improved.
Validation
For the safety function, the validation ensures that all safety-relevant parts achieve the requirements.
required Performance
Level (PL)
NORSTAT INC. 300 Roundhill Dr. Rockaway, NJ 07866
Tel: 973-586-2500 Fax: 973-586-1590 www.norstat.com