2 configuration parameters 30, Configuration parameters 30 - 42, Cntr – West Control Solutions Pro-4 User Manual
Page 30: 2 configuration parameters, Configuration level
4.2 Configuration parameters
Configuration level
Configuration parameters
30
KS 90-1 / KS 92-1
Cntr
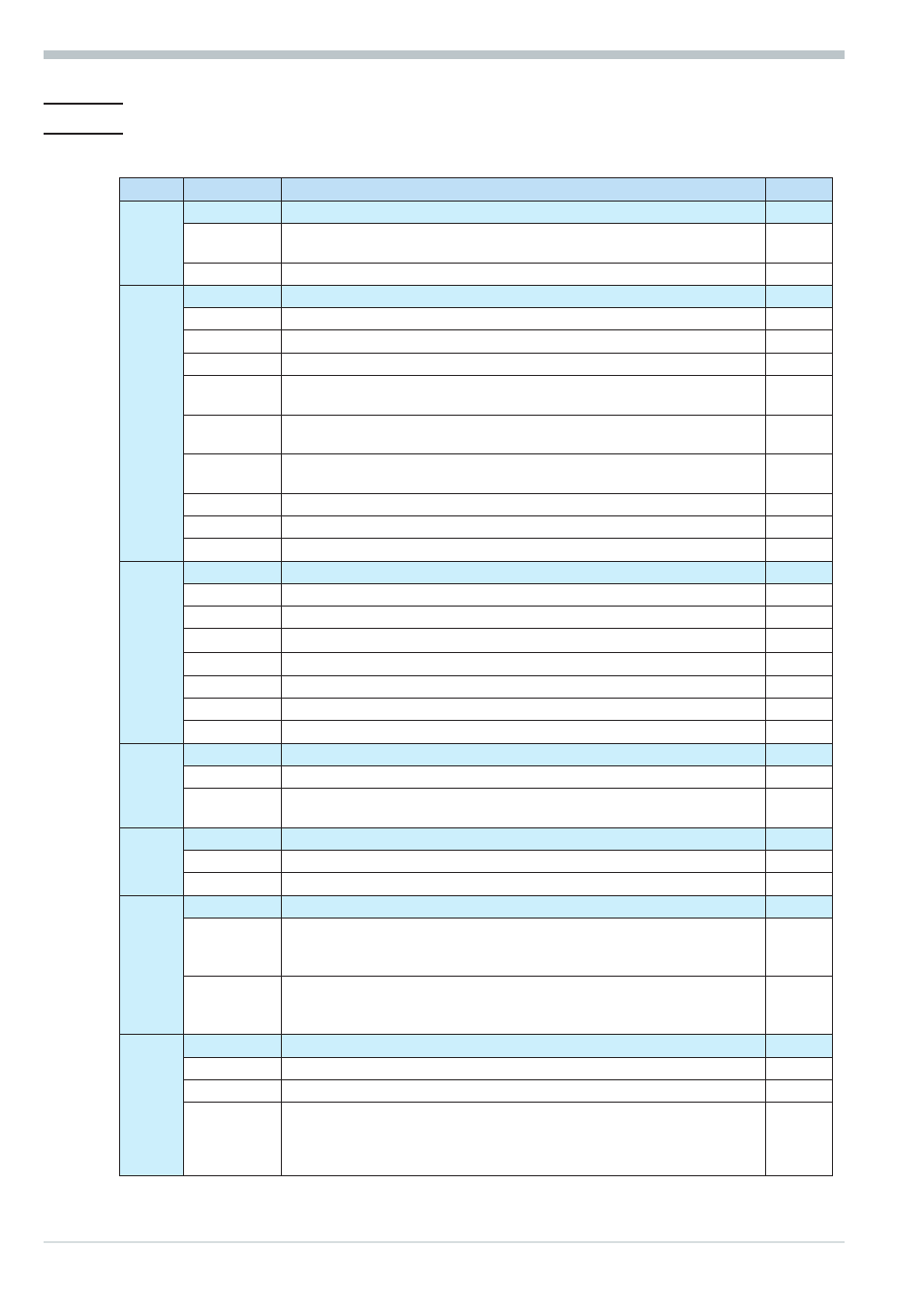
Name Value range Description
Default
SP.Fn
Basic configuration of setpoint processing
0
0
set-point controller can be switched over to external set-point
(-> LOGI/ SP.E)
8
standard controller with external offset (SP.E)
C.tYP
Calculation of the process value
0
0
standard controller (process value = x1)
1
ratio controller (x1/x2)
2
difference (x1 - x2)
3
Maximum value of x1and x2. It is controlled with the bigger value.
At sensor failure it is controlled with the remaining actual value.
4
Minimum value of x1and x2. It is controlled with the smaller value.
At sensor failure it is controlled with the remaining actual value.
5
Mean value (x1, x2). With sensor error, controlling is continued
with the remaining process value.
6
Switchover between x1 and x2 (-> LOGI/ I.ChG)
7
O
2
function with constant sensor temperature
8
O
2
function with measured sensor temperature
C.Fnc
Control behaviour (algorithm)
1
0
on/off controller or signaller with one output
1
PID controller (2-point and continuous)
2
∆ / Y / Off, or 2-point controller with partial/full load switch-over
3
2 x PID (3-point and continuous)
4
3-point stepping controller
5
3-point stepping controller with position feedback Yp
6
continuous controller with integrated positioner
C.dif
Output action of the PID controller derivative action
0
0
Derivative action acts only on the measured value.
1
Derivative action only acts on the control deviation
(set-point is also differentiated)
mAn
Manual operation permitted
0
0
no
1
yes (r LOGI / mAn)
C.Act
Method of controller operation
0
0
inverse, e.g. heating
The correcting variable increases with decreasing process value and
decreases with increasing process value.
1
direct, e.g. cooling
The correcting variable increases with increasing process value and
decreases with decreasing process value.
FAIL
Behaviour at sensor break
1
0
controller outputs switched off
1
y = Y2
2
y = mean output. The maximum permissible output can be adjusted
with parameter Ym.H. To prevent determination of inadmissible
values, mean value formation is only if the control deviation is
lower than parameter L.Ym.